V
主页
ros如何在避开障碍物的同时进行导航
发布人
网络
打开封面
下载高清视频
观看高清视频
视频下载器
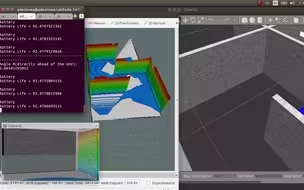
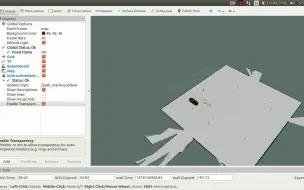
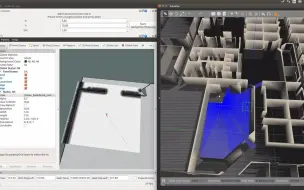
使用 Gazebo、Rviz、Hector SLAM 和 Octomap 在 ROS 中进行无人机自主导航、2D 和 3D 映射
《松灵ROS 2开讲啦》第六期 Nav2导航应用
在 ROS 和 Gazebo 中使用 purepersuit 规划器进行 AGV 导航
使用 ROS 的 gmapping 工具“学习”地图然后导航slam
【开源无人机】从零调试一架开源无人机
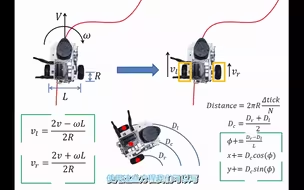
使用ROS的自主导航移动机器人 | 激光雷达 | 差动驱动运动学
机器人导航与避障 | 云深处 2024 ROS 暑期学校
具有 ROS 和 Gazebo 的四轮机器人,用于 SLAM 和导航
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
Mirobot_ROS_01介绍_1
《ROS自主无人机:从理论到实践》首期训练营 自主定位| 场景重建| 规划导航
基于多智能体强化学习的多小车建图与导航
2025工创赛物流搬运机器人规则分析与备赛计划
通过创建带有摄像头和激光雷达的自定义 4 轮机器人来学习 ROS 基础知识gazebo
【开源无人机】舵机控制教学
2025工创赛物流搬运机器人 赛事解读与问题分析2
套件教程-RTABMap之3D雷达定位与导航
基于stm32和ros串口通信,利用moveit进行路径规划,将轨迹送给stm32执行,带动机械臂运动
2025年工创赛 物流搬运机器人 全流程调试
A星融合DWA的路径规划算法实现静态避障碍及动态避障matlab A*
基于yolo和moveit的图像识别机械臂目标抓取搬移
使用 ROS 在 Gazebo 中模拟抓取机器人
基于搭建的仿真Livox mid360雷达与仿真环境实现LeGO-LOAM
使用相机在ROS下的TensorRT量化推理yolo模型以及使用BYTEtrack算法进行目标跟踪部分的更新
ROS2 零基础入门教材推荐
在 ROS 和 Gazebo 中使用激光雷达和 RGBD 相机的 RTAB-Map SLAM
基于ros路径规划+避障演示
调车总不能炸机了吧(●'◡'●)
作为 ROS1 开发人员学习 ROS2 并迁移您的 ROS 项目
【开源无人机】Vins_fusion代码讲解
在 ROS 和 Gazebo 模拟上使用 Python 脚本绘制圆和避障
2025工创赛物流搬运机器人 如何码垛 如何启动 注意什么??
【考核用】调用opencv识别aruco码,在ros中更新tf
帮粉丝做的任务:强化学习控制机械臂完成抓取以及插销
ROS 颜色目标识别与定位的 Python 实现
[竞赛直击]中国机器人及人工智能微型无人机-国一客户案例-Phoenix330
2025工创赛 物流搬运机器人场地 新鲜出炉 价格最低 质量保障
使用 ROS Moveit 和 Arduino 对机器人机械手进行逆运动学和轨迹执行。
ROS 颜色目标跟随的 Python 实现
将 Matlab/Simulink 与 V-REP 接口,以轻松开发机器人平台基于传感器的控制算法