V
主页
京东 11.11 红包
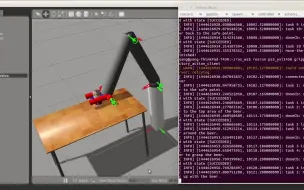
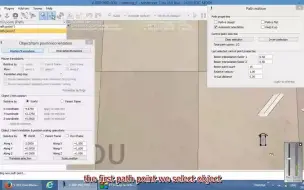
使用 ROS Moveit 和 Arduino 对机器人机械手进行逆运动学和轨迹执行。
发布人
网络 这是一个3自由度平面机械手项目,它使用Moveit、ros_control包、Ikfast插件、交互式标记和Arduino来求解逆运动学并执行指定的轨迹。
打开封面
下载高清视频
观看高清视频
视频下载器
使用 ROS Moveit 和 OpenCV 执行拾取和放置动作的六自由度机械臂
MATLAB 2021 中机器人机械手的 PID 控制器
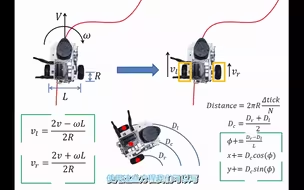
使用ROS的自主导航移动机器人 | 激光雷达 | 差动驱动运动学
使用 ROS 在 Gazebo 中模拟抓取机器人
ROS控制 | 第一轮控制功能包讲解
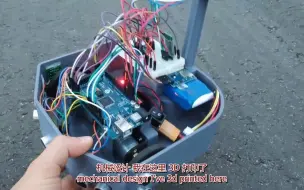
Arduino GPS 机器人,回家和航点驾驶
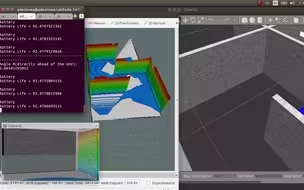
使用 Gazebo、Rviz、Hector SLAM 和 Octomap 在 ROS 中进行无人机自主导航、2D 和 3D 映射
ros如何在避开障碍物的同时进行导航
使用 Arduino 控制步进电机 - 教程
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
通过创建带有摄像头和激光雷达的自定义 4 轮机器人来学习 ROS 基础知识gazebo
全轮ROS gazebo机器人
使用 MATLAB 进行 3DOF 并联机器人仿真 [Roll-Pitch-Heave]
分享几个ROS简单的脚本
DIY杂耍机器人,很高兴终于实现了
机器人竞赛基础技术讲解(2)-9月18日
在 ROS 和 Gazebo 中使用激光雷达和 RGBD 相机的 RTAB-Map SLAM
用ESP32S3制作的迷你图传机器人
在 ROS 和 Gazebo 中使用 purepersuit 规划器进行 AGV 导航
使用 ESP32制作微型 9 轴机器人 中文配音
【开源无人机】零基础首飞一架开源无人机
M5Stack 2024年日本创意大赛第一名:智能机械手
ROS gmapping + DWA 规划器与 Bveeta 迷你 R 型移动机器人
挑战全网!自制一只机械手
具身智能机械狗!OpenDog V3:开源四足机器人项目
ROS控制 | 第一轮导航代码使用和计时器使用讲解
使用PID控制直流电机的位置和速度| ROS 控制
铰接式车辆的运动规划
01:V-Rep / CoppeliaSim 中的巡线机器人 | 教程进行建模的分步实施
使用Arduino的迷你机械臂 - 保存/播放位置。
【花雕学编程】Arduino动手做(233)---ESP32-S3 UNO读取ADXL345的XY轴控制WS2812灯屏的单个灯珠
第26讲:无人机检测与追踪行人(YOLO)仿真
马里奥麦克纳姆轮小车及其室内视觉定位 【AI配音】
边玩边学ESP32 - 第二集
ESP8266宿舍开门
ROS远程唤醒有难度?完全不存在的!
三种步态展示 竟然是STM32F103主控的六足机器人 三角步态 涟漪步态 波动步态
【赛博日报】这一只柔和的机械手
如何使用 Arduino 和 Matlab 制作超声波雷达 | 基于Matlab的超声波雷达
学习小记:如何解决Rviz和Gazebo中机器人运动不同步的问题(Rviz中机器人固定不动的问题)