V
主页
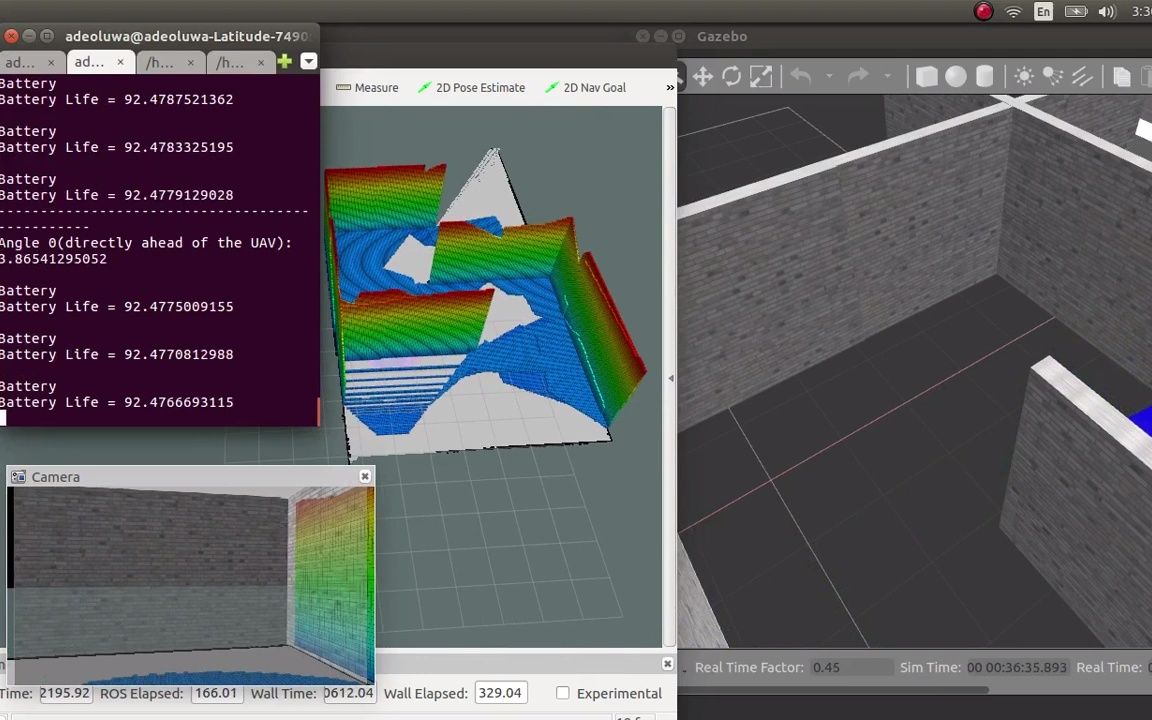
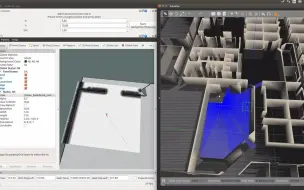
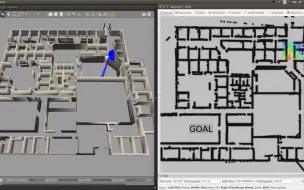
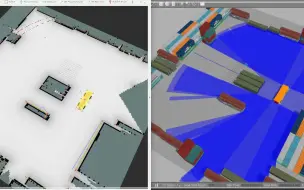
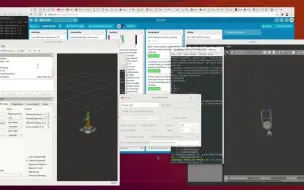
使用 Gazebo、Rviz、Hector SLAM 和 Octomap 在 ROS 中进行无人机自主导航、2D 和 3D 映射
发布人
网络
打开封面
下载高清视频
观看高清视频
视频下载器
在 ROS 和 Gazebo 中使用 purepersuit 规划器进行 AGV 导航
在 ROS 和 Gazebo 中使用激光雷达和 RGBD 相机的 RTAB-Map SLAM
无人机无人艇协同降落gazebo仿真
使用 ROS + Arduino + LIDAR 的 SLAM 自主机器人
来自 IMU 传感器的 Roll Pitch Yaw 并在 RVIZ ROS 中对其进行可视化 | MPU6050
具有 ROS 和 Gazebo 的四轮机器人,用于 SLAM 和导航
全轮ROS gazebo机器人
使用 ROS 的 gmapping 工具“学习”地图然后导航slam
ros如何在避开障碍物的同时进行导航
使用 ROS 在 Gazebo 中模拟抓取机器人
SCARA 使用 ROS 在 Gazebo 中拾取和放置任务传送带
通过创建带有摄像头和激光雷达的自定义 4 轮机器人来学习 ROS 基础知识gazebo
通过 ROS 将gazebo环境与 Matab 结合
【yfhome】低成本移动机械臂
移动自主机器人中的传感器融合| IMU+车轮里程计
ROS Gazebo 上带有 5 DOF 模拟视频的漫游者
使用 ROS 2、Gazebo 和 OpenCV 进行车道跟踪模拟
在 ROS 和 Gazebo 模拟上使用 Python 脚本绘制圆和避障
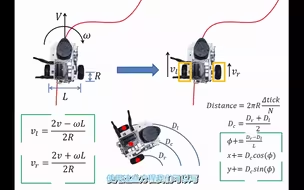
使用ROS的自主导航移动机器人 | 激光雷达 | 差动驱动运动学
使用 RPLidar A1 在 ROS 中基于激光雷达的 SLAM 和路径跟踪
EKF SLAM 扩展卡尔曼滤波slam的matlab算法
SLAM - 创建地图和自主导航演示
ROS2之PCL库的使用
自主避障无人机3m/s测试【第二版控制器】
[开源] 基于Flutter的跨平台ROS人机交互软件(v0.1.3) 更新虚拟手柄控制,界面优化
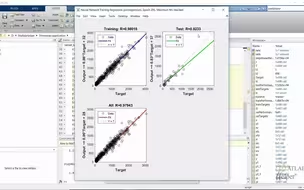
使用时间序列神经网络进行数据预测matlab算法程序
ROS 和 Gazebo 中 4 轮转向 AGV 的路径规划
ROS2之Mapviz可视化工具介绍
单独PC上ROS-Gazebo仿真中DARWIN-OP机器人的MATLAB控制
2024.7.17-双无人机矩形轨迹飞行
Gazebo 中的四足机器人仿真
Navigation2: 纯路径追踪算法论文导读
2024.7.2-保留障碍物建图
这张ros克隆盘,让我体验了一把满血ros,有点折腾、但很爽!
手工制作-多个Realsense硬同步
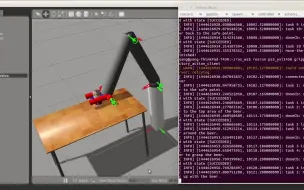
使用 moveit、Ros_control 和 Python 进行 4 自由度机器人手臂运动 go_to_pose
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
自动驾驶carla ros仿真Apollo移植算法调试
使用 RRT* 和 OCTOMAP 在动态环境中进行无人机路径规划
【ROS机械臂入门教程】被古月居收录,感谢大家的支持!!!