V
主页
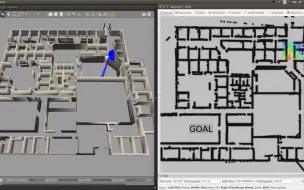
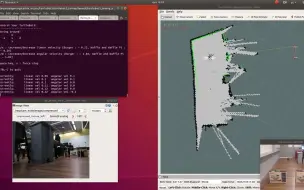
在 ROS 和 Gazebo 中使用 purepersuit 规划器进行 AGV 导航
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
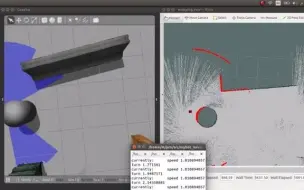
ros如何在避开障碍物的同时进行导航
使用 Gazebo、Rviz、Hector SLAM 和 Octomap 在 ROS 中进行无人机自主导航、2D 和 3D 映射
SCARA 使用 ROS 在 Gazebo 中拾取和放置任务传送带
具有 ROS 和 Gazebo 的四轮机器人,用于 SLAM 和导航
全轮ROS gazebo机器人
使用 ROS 在 Gazebo 中模拟抓取机器人
ROS 和 Gazebo 中 4 轮转向 AGV 的路径规划
使用 ROS 2、Gazebo 和 OpenCV 进行车道跟踪模拟
在 ROS 和 Gazebo 模拟上使用 Python 脚本绘制圆和避障
通过创建带有摄像头和激光雷达的自定义 4 轮机器人来学习 ROS 基础知识gazebo
使用ROS的自主导航移动机器人 | 激光雷达 | 差动驱动运动学
使用 ROS 的 gmapping 工具“学习”地图然后导航slam
Gazebo 中的四足机器人仿真
无人机无人艇协同降落gazebo仿真
单独PC上ROS-Gazebo仿真中DARWIN-OP机器人的MATLAB控制
在 ROS 和 Gazebo 中使用激光雷达和 RGBD 相机的 RTAB-Map SLAM
ROS Gazebo 上带有 5 DOF 模拟视频的漫游者
使用 moveit、Ros_control 和 Python 进行 4 自由度机器人手臂运动 go_to_pose
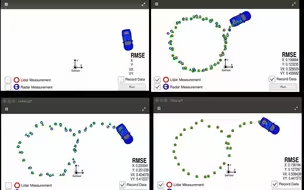
使用基于传感器融合的扩展卡尔曼滤波器进行对象跟踪
ROS gmapping + DWA 规划器与 Bveeta 迷你 R 型移动机器人
从 Simulink 连接并部署到 ROS/ROS2 网络 | AUV 深潜,第 4 部分
使用 ROS Moveit 和 Arduino 对机器人机械手进行逆运动学和轨迹执行。
V-REP ROS 插件构建教程
Turtlebot3 Maze Solving
ROS2之PCL库的使用
使用 ROS + Arduino + LIDAR 的 SLAM 自主机器人
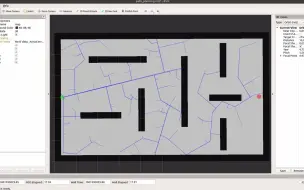
使用 RRT 算法进行地图搜索
SLAM - 创建地图和自主导航演示
使用最佳控制穿过无信号交叉路口的联网自动驾驶汽车
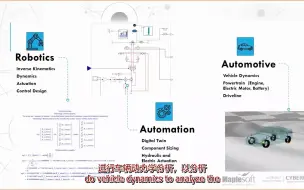
使用 Adams 和 MapleSim 对混合动力电动汽车动力学进行高保真建模
使用 Arduino 控制步进电机 - 教程
模拟 NAO 在 Gazebo 中的行走
使用 Matlab 绘制频谱
来自 IMU 传感器的 Roll Pitch Yaw 并在 RVIZ ROS 中对其进行可视化 | MPU6050
通过 ROS 将gazebo环境与 Matab 结合
使用 ROS Moveit 和 OpenCV 执行拾取和放置动作的六自由度机械臂
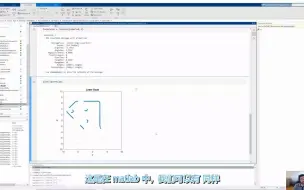
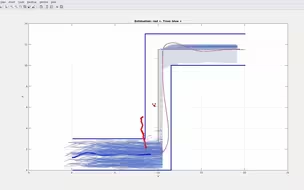
使用地图数据进行定位的粒子滤波器 matlab
使用 Simulink 进行四象限直流电机控制仿真建模模型
基于opencv的卡尺拟线
使用Realsense深度相机从点云进行目标检测和3D姿态估计