V
主页
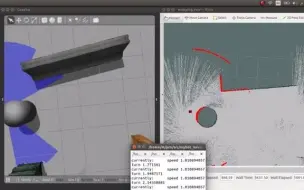
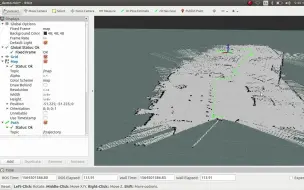
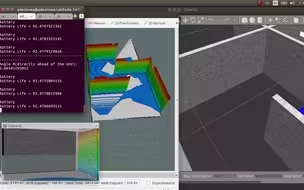
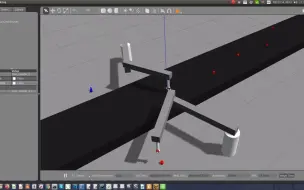
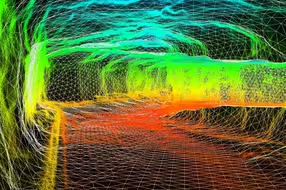
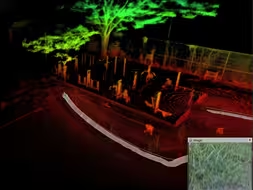
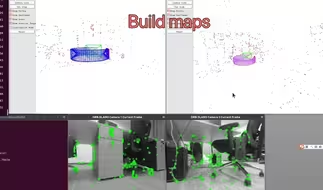
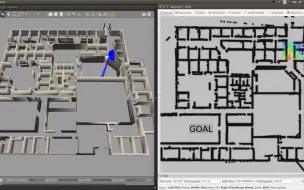
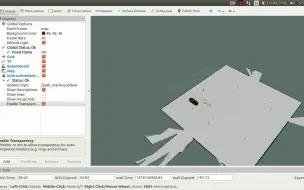
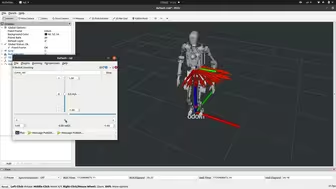
在 ROS 和 Gazebo 中使用激光雷达和 RGBD 相机的 RTAB-Map SLAM
发布人
网络
打开封面
下载高清视频
观看高清视频
视频下载器
通过创建带有摄像头和激光雷达的自定义 4 轮机器人来学习 ROS 基础知识gazebo
全轮ROS gazebo机器人
【ROS】机器人小车Gazebo仿真
终于改装完成,户外机器人底盘,ROS,四轮驱动+阿克曼,支持二开
OpenLoong开源人形机器人青龙Gazebo仿真
ROS 智能小车 未知地图自主导航建图 机器人导论大作业留档
使用 ROS + Arduino + LIDAR 的 SLAM 自主机器人
使用 RPLidar A1 在 ROS 中基于激光雷达的 SLAM 和路径跟踪
使用 Gazebo、Rviz、Hector SLAM 和 Octomap 在 ROS 中进行无人机自主导航、2D 和 3D 映射
加速道路资产盘点,灵光Lixel助力交通管理智能化| 手持激光雷达
SCARA 使用 ROS 在 Gazebo 中拾取和放置任务传送带
地下矿井巷道SLAM三维重建激光雷达点云建模——So Easy!
小白机器人相机+雷达做目标检测和跟踪测试
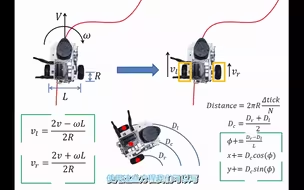
使用ROS的自主导航移动机器人 | 激光雷达 | 差动驱动运动学
ROS-Gazebo-Rviz-轨迹规划与跟踪算法合集__01_LQR&A_Star
地面重建测试 | DLIO+UFOMap
在 ROS 和 Gazebo 模拟上使用 Python 脚本绘制圆和避障
[RA-L2023] CamMap:基于SLAM地图对齐方式的非重叠视场相机的外参标定
使用 ROS 的 gmapping 工具“学习”地图然后导航slam
灵光Lixel L2,助力全球最长在建海底公路隧道项目
毕设记录第一集——gazebo五车三机仿真环境
HANDLER——基于YOLOv8及SLAM算法的智能家庭服务机器人
工创机器人新品出炉
终于画出来咯
在 ROS 和 Gazebo 中使用 purepersuit 规划器进行 AGV 导航
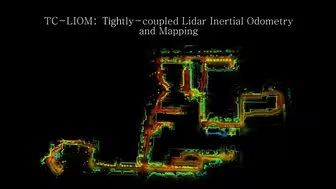
TC-LIOM:Tightly-coupled Lidar Inertial Odometry and Mapping(Demo 02)
OpenLoong青龙ROS运动控制
SCARA 机器人 MATLAB-Simulink 仿真四自由度机械臂
【ROS】【三维重建】【工程实践】 雷达+深度相机实现深度优先搜索
单独PC上ROS-Gazebo仿真中DARWIN-OP机器人的MATLAB控制
Gazebo 中的四足机器人仿真
第17届成图大赛增材制造赛道 舍弃了眉毛上下动这一功能,其他功能基本完成!
(开源)最迷你的ROS2 机器人,自动路径规划、视觉识别、人体检测跟随、手势识别控制、多形态切换(想要资料评论区留言安排!)
ROS中的目标检测与ORBSLAM结合
ROS Gazebo 上带有 5 DOF 模拟视频的漫游者
7月6日组会:2024CVPR 中使用3DGS的SLAM
ROS 和 Gazebo 中 4 轮转向 AGV 的路径规划
通过 ROS 将gazebo环境与 Matab 结合
C++单元测试gtest的介绍及其在ROS中的应用实战(一)
OpenLoong青龙人形机器人ROS URDF包