V
主页
京东 11.11 红包
ROS仿真-基于反馈线性化控制的机器人编队
发布人
淘宝链接:https://item.taobao.com/item.htm?ft=t&id=724090589371
打开封面
下载高清视频
观看高清视频
视频下载器
基于反馈线性化控制的机器人编队理论下
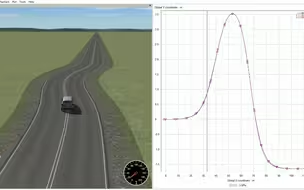
基于LQR路径跟踪仿真效果展示(基于运动学模型)
《ROS 2机器人开发从入门到实践》6.4.4 使用两轮差速插件控制机器人
纯跟踪算法理论下
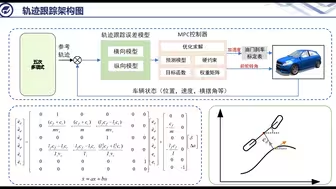
基于MPC轨迹跟踪~理论篇上
基于运动学的MPC路径跟踪控制
《ROS 2机器人开发从入门到实践》6.4.1安装与使用Gazebo构建世界
MPC横纵向控制
2.基于运动学的MPC路径跟踪-理论篇-预测模型推导
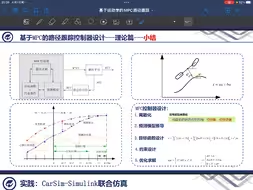
7.基于运动学的MPC路径跟踪-理论篇-小结
党的创新理论(磨耳朵)
2d slam-移动机器人自主全局重定位展示
基于MPC轨迹跟踪~理论篇下
《ROS 2机器人开发从入门到实践》6.3.2为机器人部件添加质量与惯性
《ROS 2机器人开发从入门到实践》6.3.1为机器人部件添加碰撞属性
4.基于运动学的MPC路径跟踪-理论篇-约束设计
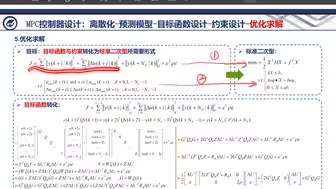
3.基于运动学的MPC路径跟踪-理论篇-目标函数设计
体验Isaac sim4.2中的人形机器人示例
机器人编队(MATLAB版本)
实践篇-carsim与simulink联合仿真-上线啦
横向基于MPC,纵向基于双PID的轨迹跟踪控制
CarSim 中获取动力学相关参数
在carsim中添加传感器(位置传感器)
第一次在机器身上看出懵逼这两个字
【网友提问系列】双非硕士控制专业如何规划未来?从实习到职业方向解析
军事理论第三章
纯跟踪算法CarSim/Simulink联合仿真
如何使用给定的CarSim与Simulink联合仿真资源
【开源无人船】超维USV-M690开源ROS无人船
【暂时放弃的方案】RACER+倒置激光雷达自主探索无人机测试
abaqus断裂裂纹仿真
《ROS 2机器人开发从入门到实践》6.4.2在Gazebo中加载机器人模型
【公开课】Buck变换器之控制与仿真 —— DC-DC开关电源设计实战
国外网友看无人轰炸机编队!外国人:这将给航母带来致命打击!
纯跟踪算法理论上
【matlab&simulink手把手教学】开篇
序列有向多链路攻击下四旋翼无人机集群安全时变编队飞行
CST基站天线仿真方案
ANSYS Electronics 有限元仿真入门与常用技巧(EDT-Maxwell部分)基于2024R1
03_路径发布节点解读-1