V
主页
MPC横纵向控制
发布人
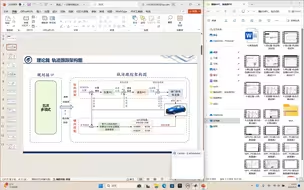
简述Apollo轨迹跟踪架构,简述MPC控制量与控制增量设计区别(无其他内容,主要是联合反正文件,介意勿拍),长恨歌非常惊艳,就不过多剧透,去西安一定要看
打开封面
下载高清视频
观看高清视频
视频下载器
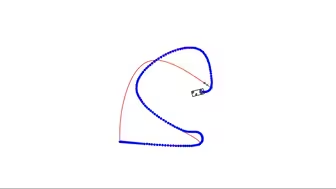
横向基于MPC,纵向基于双PID的轨迹跟踪控制
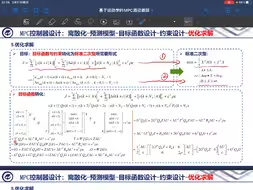
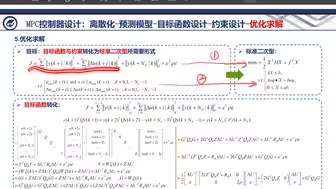
6.基于运动学的MPC路径跟踪-理论篇-优化求解下
基于MPC轨迹跟踪~理论篇上
1.基于运动学的MPC路径跟踪-理论篇-离散化
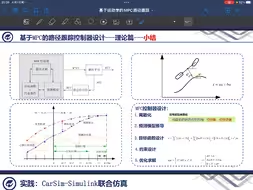
7.基于运动学的MPC路径跟踪-理论篇-小结
2.基于运动学的MPC路径跟踪-理论篇-预测模型推导
5.基于运动学的MPC路径跟踪-理论篇-优化求解上
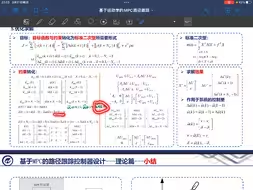
基于运动学的MPC路径跟踪控制
3.基于运动学的MPC路径跟踪-理论篇-目标函数设计
4.基于运动学的MPC路径跟踪-理论篇-约束设计
顶刊 TNNLS 复现:基于强化学习的机械臂固定时间轨迹跟踪控制
自动驾驶模型预测控制轨迹跟踪
基于MPC轨迹跟踪~理论篇下
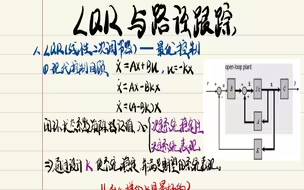
LQR简介与使用
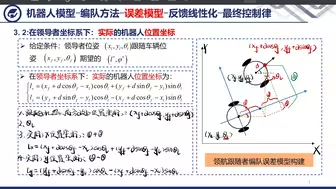
基于反馈线性化控制的机器人编队理论上
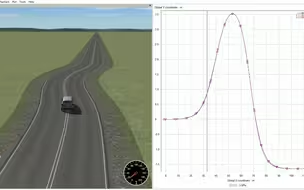
基于LQR路径跟踪仿真效果展示(基于运动学模型)
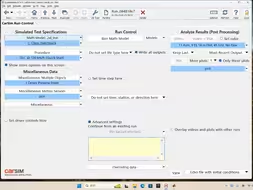
CarSim-Simulink联合仿真多车环境搭建
CarSim 中获取动力学相关参数
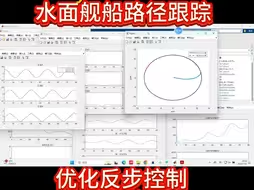
顶刊:无人船轨迹跟踪 优化反步控制 强化学习 Actor-critic算法
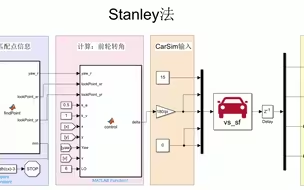
Stanley理论篇
在carsim中添加传感器(位置传感器)
基于LQR控制与运动学模型的路径跟踪
ROS仿真-基于反馈线性化控制的机器人编队
纯跟踪算法理论下
基于车辆动力学与LQR控制的路径跟踪
纯跟踪算法理论上
基于反馈线性化控制的机器人编队理论下
纯跟踪算法用于倒车
纯跟踪算法CarSim/Simulink联合仿真
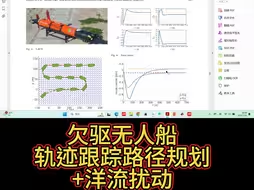
【顶刊复现】欠驱无人船轨迹跟踪+洋流扰动
实践篇-carsim与simulink联合仿真-上线啦
如何使用给定的CarSim与Simulink联合仿真资源
英国留学崩了
【干货】如何买下美国
基于领航跟随的车辆编队
机器人编队(MATLAB版本)
先升攻和先升防哪个好?
控制器V2.5版本测试,3.5m/s
【干货】如何手搓黑洞
Stanley仿真篇- CarSim与Simulink联合仿真