V
主页
京东 11.11 红包
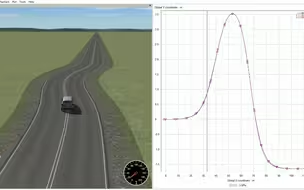
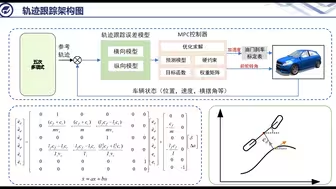
基于运动学的MPC路径跟踪控制
发布人
基于运动学的MPC路径跟踪控制上线啦!理论篇,实践篇,助力快速成长。
打开封面
下载高清视频
观看高清视频
视频下载器
纯跟踪算法理论上
基于MPC轨迹跟踪~理论篇下
横向基于MPC,纵向基于双PID的轨迹跟踪控制
1.基于运动学的MPC路径跟踪-理论篇-离散化
基于MPC轨迹跟踪~理论篇上
「精校熟肉」欠驱动机器人学(MIT 6.8210) 2024春-L1-机器人动力学与基于模型的控制
基于车辆动力学模型与LQR控制路径跟踪效果展示
【顶刊复现】基于MPC模型预测控制水下机器人AUV的路径跟踪
纯跟踪算法理论下
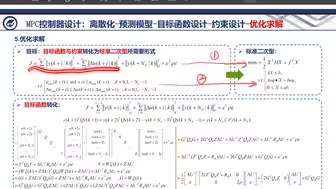
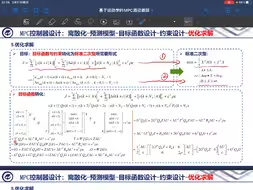
6.基于运动学的MPC路径跟踪-理论篇-优化求解下
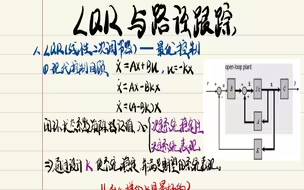
基于LQR路径跟踪仿真效果展示(基于运动学模型)
3.基于运动学的MPC路径跟踪-理论篇-目标函数设计
基于LQR控制与运动学模型的路径跟踪
基于车辆动力学与LQR控制的路径跟踪
LQR简介与使用
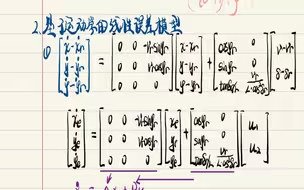
2.基于运动学的MPC路径跟踪-理论篇-预测模型推导
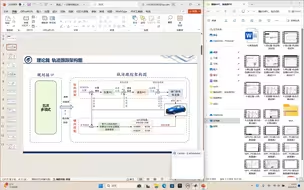
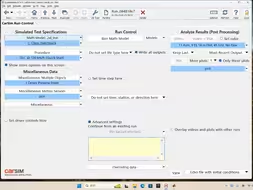
实践篇-carsim与simulink联合仿真-上线啦
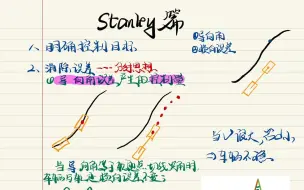
Stanley理论篇
MPC横纵向控制
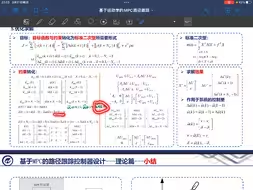
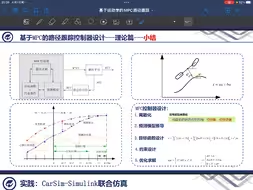
7.基于运动学的MPC路径跟踪-理论篇-小结
CarSim-Simulink联合仿真多车环境搭建
4.基于运动学的MPC路径跟踪-理论篇-约束设计
5.基于运动学的MPC路径跟踪-理论篇-优化求解上
IEEE顶刊:水下机器人AUV路径规划和MPC模型预测控制跟踪控制(复现)
纯跟踪算法用于倒车
纯跟踪算法CarSim/Simulink联合仿真
CarSim 中获取动力学相关参数
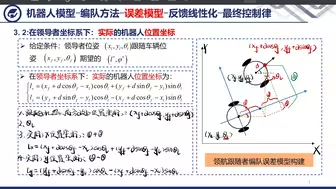
基于反馈线性化控制的机器人编队理论下
基于反馈线性化控制的机器人编队理论上
在carsim中添加传感器(位置传感器)
Ableton move,4轨道的律动盒子。。。就这?
ROS仿真-基于反馈线性化控制的机器人编队
终于走上波士顿动力的技术路线了,算法很强,软件很难调。ocs2质心动力学MPC+WBC,6自由度的腿也调好了,加上了碰撞约束,参数还没细调,能够行走1m/s多。
基于状态空间模型预测控制的四旋翼路径跟踪实现 (文档+仿真 NMPC )
「精校熟肉」欠驱动机器人学(MIT 6.8210) 2023春-L2-非线性动力学
【MPC+强化学习】四大名校教授精讲强化学习和模型预测控制18讲!Actor Critic模型预测控制、策略梯度方法
【论文代码复现125】全网首个支持自定义地图的基于星鸦算法的路径规划算法
[通过好题练思维]20241007期:坚守要素网思维路径的优质练习
论文复现:MPC-D-CBF (基于动态屏障函数的移动机器人balabala的模型预测控制)
四足机器人足臂协同 ocs2 qm_control 开源项目学习