V
主页
京东 11.11 红包
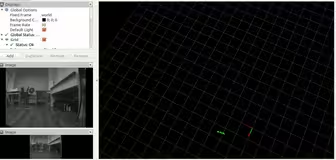
【ICRA2021】3479-多智能体环境中的实例感知预测导航
发布人
在这项工作中,我们的目标是在动态的多智能体环境中实现高效的端到端驾驶策略学习。在对象级别上预测和预测未来事件对于做出明智的驾驶决策至关重要。我们提出了一种实例感知预测控制(IPC)方法,它可以预测代理之间的交互以及未来的场景结构。我们采用一种新颖的多实例事件预测模块,以自我中心视角下的个体间可能的相互作用,以自我载体选择的动作顺序为条件。为了确定每一步的动作,我们在预测模块输出的基础上,通过重复采样可能的动作序列,寻找能够导致安全未来状态的动作序列。我们设计了一个顺序动作采样策略,以更好地利用场
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
【ICRA2021】3988-大尺度环境严重里程计漂移下自主体积探测的统一方法
【ICRA2021】基于可解释目标的自动驾驶预测与规划
【ICRA2021】3507-基于时间推理方法的汽车环境感知离线动态网格生成
【ICRA2021】3764-基于相对安全飞行走廊的动态环境中多旋翼机的在线轨迹规划
【ICRA2021】3531-在未知环境中学习和规划临时扩展任务
【ICRA2021】CAROM - 道路基础设施单目相机的车辆定位和交通场景重建
【ICRA2021】高效且强大的基于 LiDAR 的端到端导航
【ICRA2021】双足运动控制接触点角动量的一步超前预测:在受 LIP 启发的控制器中的验证
压缩感知和消息传递
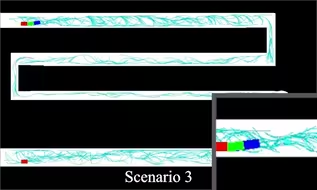
【ICRA2021】半动态环境中的终身定位
“北斗导航与多源增强”学术沙龙(自动驾驶篇)
【ICRA2021】MaAST:使用语义转换器进行地图注意力以实现高效的视觉导航
【ICRA2021】3794-学习使用各种LiDAR配置进行无地图导航:一种基于支持点的方法
【ICRA2021】基于实时3d激光雷达、毫米波雷达和GPS/IMU融合的非结构化环境下车辆检测与跟踪
【百度自动驾驶技术系列课程】自动驾驶核心模块精讲
【ICRA2021】Graph-SIM:用于行人动作预测的基于图的时空交互建模
【ICRA2021】面向阿克曼转向车辆的基于在线 RRT 的路径规划算法
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
【ICRA2021】自主室内导航中激光雷达分割的自监督学习
【ICRA2021】中国商店中的机器人:使用强化学习实现特定位置的导航行为
【ICRA2021】4028-移动机器人全局-局部耦合两阶段路径规划方法
【ICRA2021】LaND: 从脱离事件中学习导航
【ICRA2021】VOLDOR+SLAM:当基于功能或直接的方法还不够好的时候
【ICRA2021】LiDAR和相机的基于线的自动外部校准
【镭神智能】雷祖芳《激光雷达及其感知、定位导航应用》
【ICRA2021】3602-移动机器人导航的终身学习方法
【ICRA2021】里程计辅助视觉惯性 SLAM 的双向轨迹计算
【ICRA2021】3672-基于多分辨率边界的自主三维勘探规划器
【ICRA2021】3516-BADGR:一种基于自主自我监督学习的导航系统
【ICRA2021】YOLOStereo3D:回归2D,实现高效立体3D检测
【ICRA2021】3731-用于大规模勘探任务的弹性高效激光雷达重建
【ICRA2021】有数据驱动补丁先验的 MCMC 占用栅格建图
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
【ICRA2021】未探索语义环境中移动操作任务的反应式规划
【ICRA2021】UVIP:用于复杂室内环境的强大的 UWB 辅助视觉惯性定位系统
【ICRA2021】求加权彩色图全局最优路径的广义A∗算法
【ICRA2021】3855-自动驾驶汽车运动规划中的人类驾驶风格编码
【MATLAB】自主导航
比亚迪百度车机国庆版V20.8.0