V
主页
京东 11.11 红包
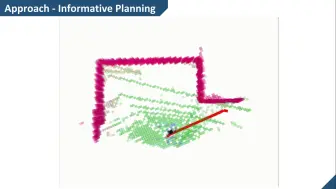
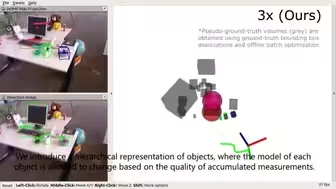
【ICRA2021】3732-RigidFusion:大型动态刚体环境中的机器人SLAM
发布人
这项工作提出了一种新的RGB-D SLAM方法,以同时分割、跟踪和重建静态背景和可以遮挡相机视图主要部分的大型动态刚性对象。先前的方法将场景的动态部分视为异常值,因此仅限于场景中的少量变化,或者依赖场景中所有对象的先验信息来实现稳健的相机跟踪。在此,我们建议将所有动态部件视为一个刚体,同时分割和跟踪静态和动态部件。因此,我们能够在动态对象导致大遮挡的环境中同时定位和重建静态背景和刚性动态组件。我们在具有大动态遮挡的多个具有挑战性的场景上评估了我们的方法。评估表明,我们的方法实现了更好的运动分割、
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
【ICRA2021】强度SLAM:大规模环境的强度辅助定位和建图
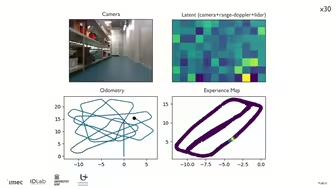
【ICRA2021】LatentSLAM:用于定位和建图的无监督多传感器表示学习
【ICRA2021】3767-通过增量采样和概率路线图对动态环境进行自主UAV探索
【ICRA2021】半动态环境中的终身定位
【ICRA2021】3764-基于相对安全飞行走廊的动态环境中多旋翼机的在线轨迹规划
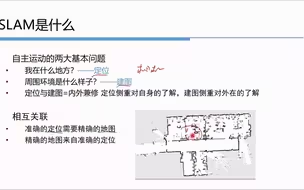
1-2 SLAM是什么
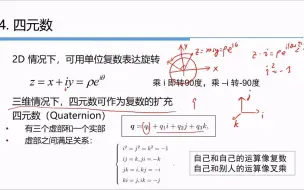
2-4 四元数
【ICRA2021】自动驾驶汽车的轻量级语义网格建图
【ICRA2021】3997-闭塞和不确定环境下安全自主导航的可视性谈判
【ICRA2021】3647-使用相对深度先验的偏振单目稠密建图
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
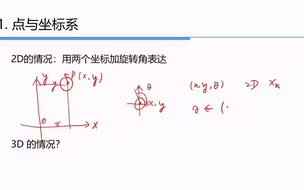
2-1 点与坐标系
【ICRA2021】使用快速可见树的实时机器人路径规划
【ICRA2021】3756-远程类车车辆的触觉引导路径生成
1-4 Linux下的C++基础
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
【ICRA2021】CAROM - 道路基础设施单目相机的车辆定位和交通场景重建
【ICRA2021】连接语义建筑信息模型和机器人:基于2D LiDAR的定位应用
5-1 特征点提取与匹配
【ICRA2021】4028-移动机器人全局-局部耦合两阶段路径规划方法
【ICRA2021】将基于人类风险的制动系统集成到露天移动机器人中
2-2 旋转矩阵
【ICRA2021】来自范围和语义分割观察的主动贝叶斯多类别建图
【ICRA2021】LIRO:紧耦合激光雷达惯性里程计
【ICRA2021】3714-How To Train Y our HERON
【ICRA2021】3711-TaskNet:一种用于自动挖掘机的神经任务规划器
【ICRA2021】4082-基于观测约束的检索与定位
【ICRA2021】用于特定领域重定位的同步多级描述符学习和语义分割
为什么需要多传感器融合
Talk | 香港科技大学黄华健:高写实三维数字化时代下的在线同时定位和建图
【ICRA2021】机器人导航的主动模块化环境
1-1课程内容与预备知识
【ICRA2021】高效鲁棒导航的分层目标地图估计
【华南农业大学】激光视觉惯性SLAM建图 - 农业工程楼
华山区大范围激光视觉惯性SLAM建图
【ICRA2021】基于训练数据自动生成的动态对象感知 LiDAR SLAM
【ICRA2021】有数据驱动补丁先验的 MCMC 占用栅格建图
【ICRA2021】高动态环境下基于搜索的类车机器人在线轨迹规划
GS-LIVOM (Environment Guideline)