V
主页
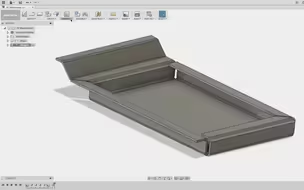
从Fusion360导出ROS URDF机器人模型
发布人
项目地址:https://github.com/syuntoku14/fusion2urdf 原视频地址:https://www.youtube.com/watch?v=cQh0gNfb6ro&t=2s
打开封面
下载高清视频
观看高清视频
视频下载器
Fusion360教程-更高阶的钣金
fusion360钣金教程案例
【开源无人车】从零组装一辆开源PIX无人车
Isaac Sim和ROS2自主移动机器人(bcr_bot)
使用Isaac Sim和ROS2实现大田农业机器人
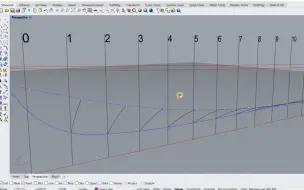
没有型线图只有点数据如何建出船体模型???
MoveIt与Isaac Sim结合使用
【开源无人机】ROS系统中yolo模型处理多摄像头
船模3D模型制作教程(Rhino 3D)
A-LOAM和LeGo-LOAM的SLAM对比,使用Kitti数据集odometry的05序列
【开源无人车】从零调试一辆PIX无人车
Rhino犀牛船舶初步参数化快速设计Seanaptic插件
12步搭建智能机器人: 从设计到AI入门
APT APT APT APT
使用Isaac Sim和ROS2控制机器狗指南
基于Gazebo的无人车激光SLAM建图与导航仿真
【开源无人机】从零组装一架开源无人机M0-F250
【开源无人机】ROS无人机编队代码讲解
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
NASA 使用 NVIDIA Isaac Sim 模拟火星探测
端到端机械臂视觉抓取无人配送的场景演示
省赛综测学分、奖学金、学ROS,统统拿下
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
开源!基于RRT*的路径规划算法(ROS C++/Python/Matlab实现)
听劝!3D建模真不是一般人能学的!
有电脑就行!三分钟安装 openEuler 操作系统并搭建ROS环境
六轴机械臂标准模型控ROS函数库快速上手
大三的建模作品,成功收到腾讯offer!
ROS控制 | 小车底盘控制讲解
【开源无人机】从零调试一架开源无人机M0-F250
7.2无人机PID参数调试
ros系统rcfusion多模态复现
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
脚本自动化船体建模
ROS2GO CUDA:开启 AI 与机器人开发的新纪元
自动驾驶入门技术全栈实战解析-2-定位篇
轨迹优化|矩形增量膨胀安全走廊构建算法(附ROS C++/Python实现)
NVIDIA Isaac ROS 3.0:重塑机器人未来
ubuntu+gnome 简约桌面
大咖助阵!诚邀您共襄ROSCon China 2024全球开发者盛会!