V
主页
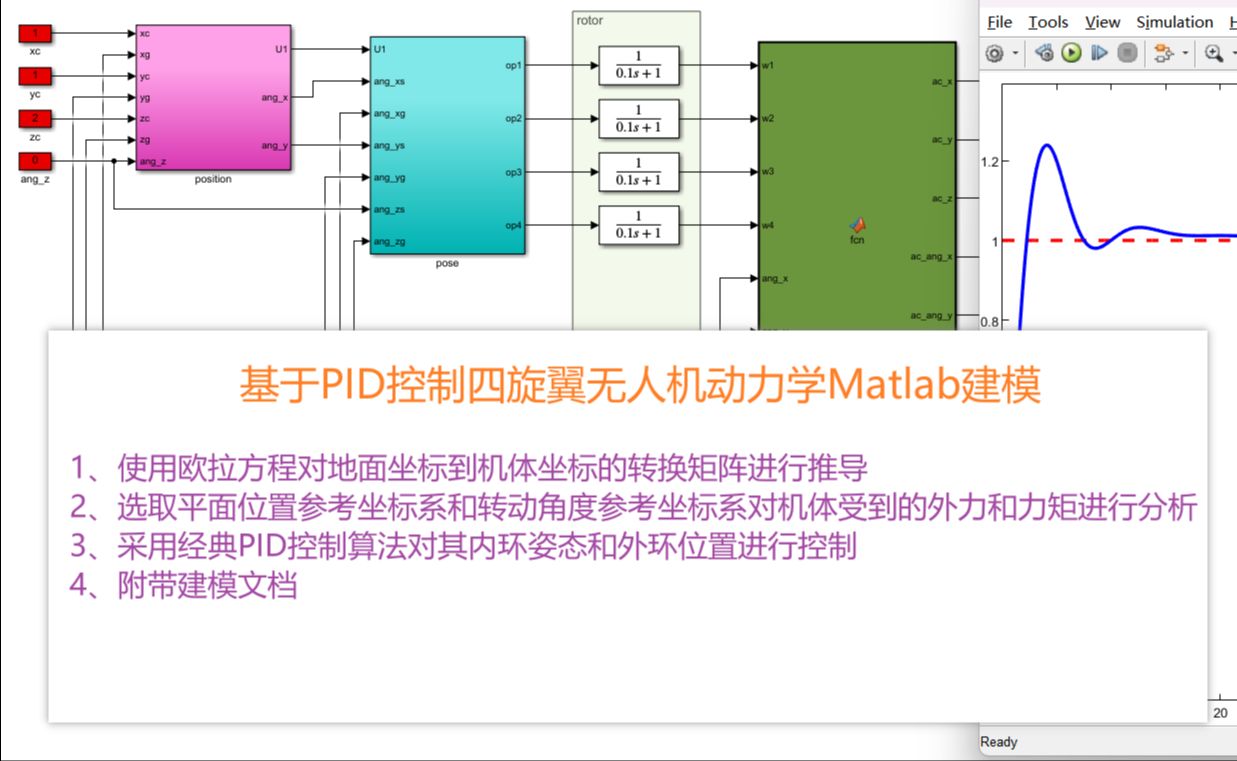
基于PID控制四旋翼无人机动力学Matlab建模
发布人
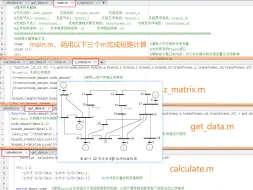
基于PID控制四旋翼无人机动力学Matlab建模 1、使用欧拉方程对地面坐标到机体坐标的转换矩阵进行推导 2、选取平面位置参考坐标系和转动角度参考坐标系对机体受到的外力和力矩进行分析 3、采用经典PID控制算法对其内环姿态和外环位置进行控制 4、附带建模文档
打开封面
下载高清视频
观看高清视频
视频下载器
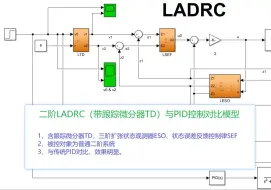
二阶LADRC(带跟踪微分器TD)与PID控制对比模型
基于反步法or滑膜控制orPID控制的四旋翼无人机轨迹跟踪模型
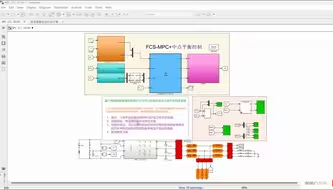
基于有限控制集模型预测(FCS-MPC)相角补偿法三电平并网逆变器
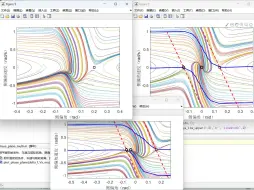
车辆稳定性相平面Matlab程序绘制(含说明文件和参考资料)
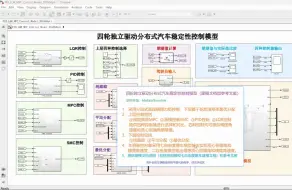
分层控制四轮独立驱动分布式汽车稳定性控制模型含MPC和SMC以及最优分配控制(建模文档和参考文献)
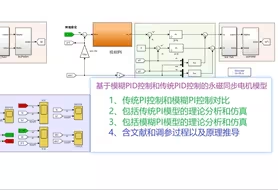
基于模糊PID控制和传统PID控制的永磁同步电机模型
基于单周期控制无桥Boost型PFC
基于自抗扰控制(ADRC)和有限集模型预测(FCS-MPC)的永磁同步电机模型
单相光伏储能并网PQ控制离网恒压恒频控制并离网切换含笔记和建模资料
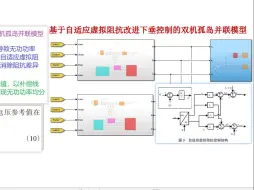
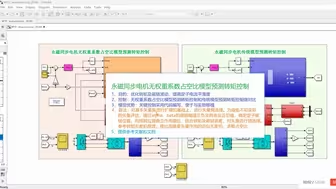
基于自适应虚拟阻抗改进下垂控制的双机孤岛并联模型
PID控制四旋翼轨迹跟踪含三维图像模型
双馈风力发电机DFIG建模与仿真(含建模文档)
双容水箱自适应模糊PID控制Matlab程序(含报告)
单相逆变器LCL并网电容电流前馈和电网电压全前馈(阮新波老师)
【圆形轨迹】基于模型预测控制(MPC)四旋翼飞行器(UAV)跟随控制
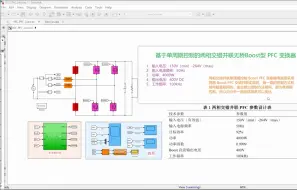
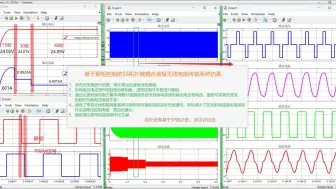
基于单周期控制的两相交错并联无桥Boost型PFC变换器
【SS拓扑】基于移相控制的磁耦合谐振无线电能传输系统仿真
三相不平衡电网下模块化多电平变流器MMC控制(含正负序分离控制环流抑制功率波动抑制双二阶广义积分器锁相环)
基于DSP28335单相逆变程序多功能版本
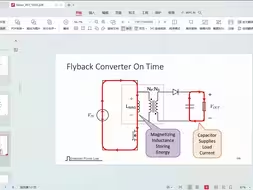
【网盘自取3】开关电源常见拓扑建模分析及波形分析学习资料
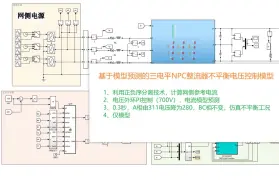
基于模型预测的三电平NPC整流器不平衡电压控制模型
基于DSP28335单相全桥逆变入门程序学习
永磁同步电机无权重系数占空比模型预测转矩控制
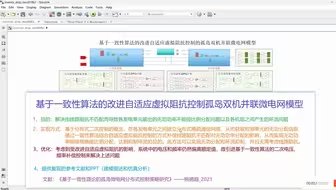
【复现】基于一致性算法的改进自适应虚拟阻抗控制孤岛双机并联微电网模型
【混合调制】基于Plecs全桥双向CLLLC谐振变换器调频+移相混合调制仿真(二)
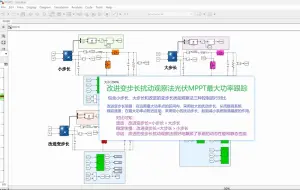
改进的变步长扰动观察法光伏MPPT最大功率跟踪(含小步长和大步长对比)
22节点短路计算课程设计Matlab程序(包括三相对称故障和不对称故障)
改进型光伏并网逆变器低压穿越仿真
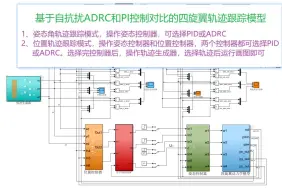
基于自抗扰ADRC和PID控制对比的四旋翼姿态角和位置轨迹跟踪模型
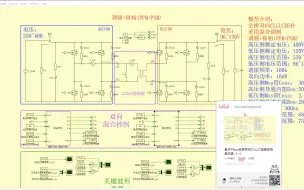
三相充电桩PWM整流SVPWM调制+全桥LLC调频控制
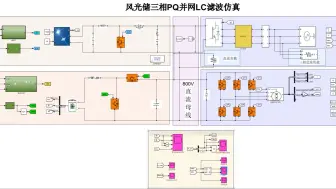
风光储三相电网PQ控制交直流能量双向流动(含学习资料和文献)
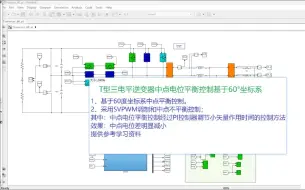
T型三电平逆变器中点电位平衡控制基于60°坐标系(含算法文档和参考文献)
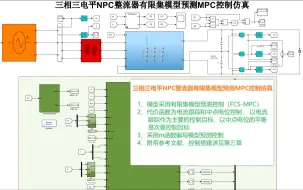
三电平NPC整流器模型预测控制mpc中点电位平衡仿真
基于模型预测控制和下垂控制的光伏储能充放电模型
基于转子侧虚拟同步控制VSG的电压型双馈发电机DFIG模型
RRT算法路径规划六自由度机械臂Matlab程序
基于PI+重复控制的单相全桥逆变LC离网模型
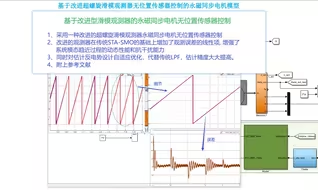
基于改进超螺旋滑模观测器的永磁同步电机无位置传感器控制
【复现】光伏并网逆变器接入弱电网的序阻抗建模扫频法与稳定性分析
IPMSM凸极机弱磁控制MTPA和超前角弱磁控制仿真