V
主页
京东 11.11 红包
【圆形轨迹】基于模型预测控制(MPC)四旋翼飞行器(UAV)跟随控制
发布人
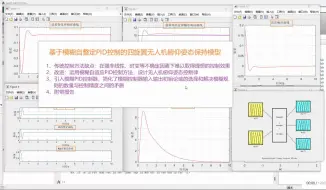
基于模型预测控制(MPC)四旋翼飞行器(UAV)跟随圆形轨迹 在无人机在保持0航向的情况下,以0.1 rad/sec的角速度在5米高度跟踪圆形轨迹。
打开封面
下载高清视频
观看高清视频
视频下载器
MPC-VSG模型预测控制和虚拟同步机控制并网逆变器
MPC+强化学习!Actor Critic模型预测控制,苏黎世大牛教授人类水平性能的自主视觉无人机演讲
RA-L 2024 | CDM-MPC 结合质心动力学和模型预测控制的人形机器人连续跳跃
论文复现:MPC-D-CBF (基于动态屏障函数的移动机器人balabala的模型预测控制)
DJI Air3S |你应该是自己的那座山
终章,暂告一段
【36+个MPC程序盲盒】607MPC代码合集-一起来开盲盒吧!
不炸就是胜利 100块组装五寸穿越机
隐式mpc+自适应mpc+时变mpc,线性时变模型预测控制Simulink仿真
基于状态空间模型预测控制的四旋翼路径跟踪实现
【复现】基于模型预测MPC控制和卡尔曼滤波的空调加热器、室内温度调节
【电控算法_8】无差拍模型预测电流控制DPCC离散模型
【MPC+强化学习】四大名校教授精讲强化学习和模型预测控制18讲!Actor Critic模型预测控制、策略梯度方法
多决策智能体的运动规划——上海交大董伟老师与荷兰代尔夫特理工Javier老师深度讨论
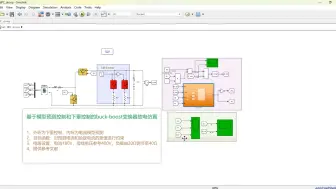
基于模型预测控制和下垂控制的储能电池buck-boost变换器放电仿真
PID控制四旋翼轨迹跟踪含三维图像模型
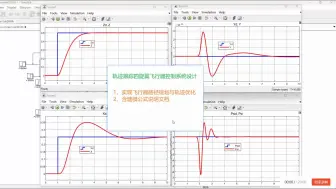
轨迹跟踪四旋翼飞行器控制系统设计
基于自抗扰ADRC控制的四旋翼飞行姿态控制模型
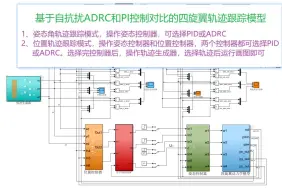
基于自抗扰ADRC和PID控制对比的四旋翼姿态角和位置轨迹跟踪模型
基于模糊自整定PID控制的四旋翼无人机俯仰姿态保持模型
基于内环有限集模型预测(FCS-MPC)+外环滑模控制+龙伯格观测器的永磁同步电机研究
Anduril发布Bolt-M便携式自杀无人机
直流微网光伏储能系统SOC均衡(基础和改进SOC均衡策略对比)含变下垂系数控制和模型预测
基于模型预测控制和下垂控制的光伏储能充放电模型
还在用上古时代的手段,拍自己的上帝视角呢?
歼20的“忠诚僚机”飞鸿97A,是个怎样的存在?
输入受限约束下基于NMPC的四旋翼轨迹跟踪控制
军校也来啦!海军航空大学限时载运比赛实录
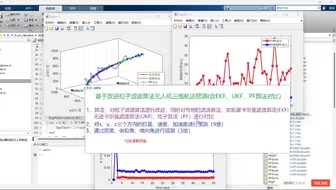
基于改进粒子滤波算法无人机三维航迹预测(含EKF、UKF、PF算法对比)
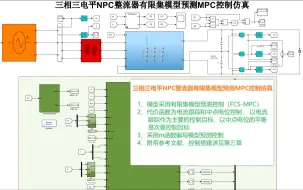
三电平NPC整流器模型预测控制mpc中点电位平衡仿真
恭喜,你已经人机合一了!
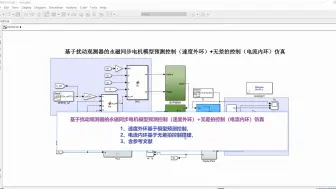
基于降阶龙伯格扰动观测器的永磁同步电机模型预测控制(速度外环)+无差拍控制(电流内环)仿真
外网火出圈!被马斯克点赞的万架无人机表演全程版来了!
【省一作品】立体货架盘点无人机系统——24年电赛D题
中国大学生自制纯太阳能动力飞机,全自动飞行高度竞速比赛
一键进入梵高的世界
穿越机是什么垃圾
三电平T型NPC逆变器MPC双矢量模型预测电流控制和功率控制+中点电位平衡仿真
Owen来造|无叶离子无人机!!!(黑格 Reflex RS)
基于自抗扰控制(ADRC)和有限集模型预测(FCS-MPC)的永磁同步电机模型