V
主页
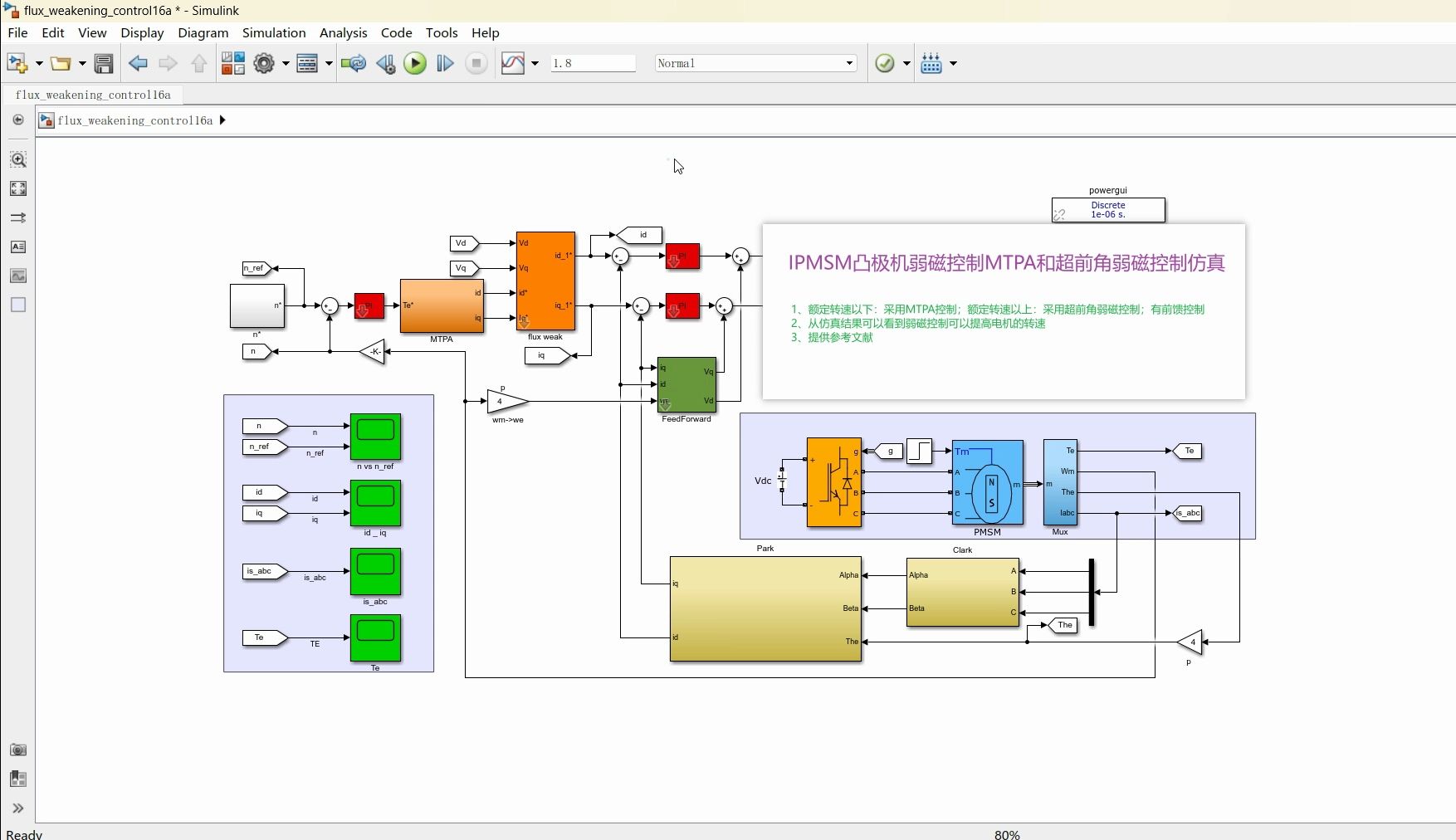
IPMSM凸极机弱磁控制MTPA和超前角弱磁控制仿真
发布人
IPMSM凸极机弱磁控制MTPA和超前角弱磁控制仿真 1、额定转速以下:采用MTPA控制;额定转速以上:采用超前角弱磁控制;有前馈控制 2、从仿真结果可以看到弱磁控制可以提高电机的转速 3、提供参考文献
打开封面
下载高清视频
观看高清视频
视频下载器
【一区论文复现】自适应强化学习机械臂控制
永磁同步电机IPMSM高频方波信号注入法的无位置传感器控制
【网盘自取】锁相环理论知识分享
内嵌永磁电机的电流角与效率MAP仿真
电机参数辨识PMSM永磁同步电机参数辨识仿真定子电阻DQ电感转子磁链辨识
基于Matlab六自由度机械臂正逆运动学及动力学分析
六自由度机械臂正运动学和逆运动学理论分析及程序
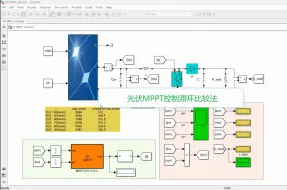
光伏MPPT控制模糊控制算法
【模型详细说明】经过离散化的高频方波注入内置式永磁同步电机IPMSM无位置传感器控制策略
双馈风力发电机DFIG建模与仿真(含建模文档)
基于非线性干扰观测器的机械臂自适应反演滑模控制
基于stm32低压无感BLDC方波控制方案(代码+原理图)
光伏MPPT控制滞环比较法
【网盘自取】平面变压器资料
储能电池充放电控制
二自由度机器人迭代学习PD型控制
永磁同步电机弱磁控制 MTPA最大转矩电流比控制算法SVPWM调制
基于连续终端滑模控制(CT-SMC)和 模糊超螺旋滑模观测器(F-ST-SMO)的永磁同步直线电机(PMLSM)交流调速系统
【评论区自行下载】硬件工程师必备电子元件基础知识(电容、电阻、电感、蜂鸣器、扬声器和磁珠等)
基于模糊自整定PID控制的四旋翼无人机俯仰姿态保持模型
基于LQR控制主动悬架模型7自由度(整车)
基于EEMF扩展反电动势法的PMSM中高速无感控制PI+PLL和PI+Luenberger龙伯格观测器仿真
STM32电机库无感代码注释无传感器版本龙贝格观测三电阻双AD采样前馈控制弱磁控制斜坡启动
基于MATLAB机械臂自适应模糊滑模控制仿真多种控制比较
基于LADRC控制位置电流双闭环和PI控制三闭环控制永磁同步直线电机PMLSM模型
三相PWM整流器仿真SPWM调制
【复现】光伏并网逆变器接入弱电网的序阻抗建模扫频法与稳定性分析
基于单周期控制无桥Boost型PFC
【混合调制】基于Plecs全桥双向CLLLC谐振变换器调频+移相混合调制仿真(二)
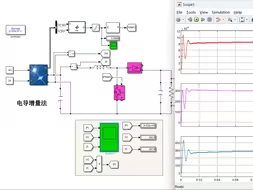
光伏MPPT控制(恒压法、电导增量法和扰动观察法)
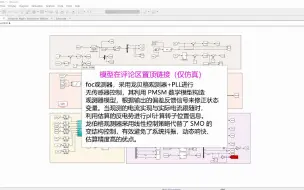
基于matlab建模FOC观测器采用龙贝格观测器+PLL进行无传感器控制(建议二倍速观看)
基于人工势场法的机械臂避障
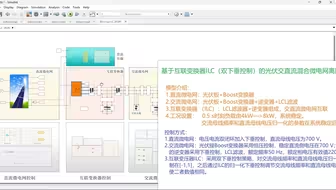
基于双下垂控制互联变换器ILC的光伏交直流混合微电网离网(孤岛)模型
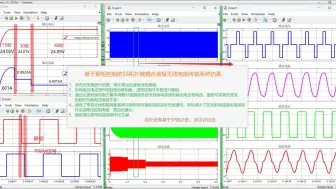
【SS拓扑】基于移相控制的磁耦合谐振无线电能传输系统仿真
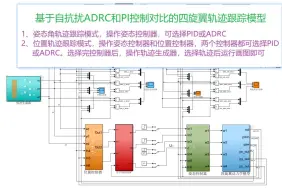
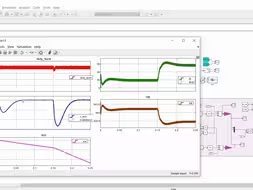
基于自抗扰ADRC和PID控制对比的四旋翼姿态角和位置轨迹跟踪模型
【S型速度轨迹规划】六自由度机械臂
【MPC】二自由度机械臂模型预测控制MATLAB 带参考文献
储能三相逆变离网VF控制
六自由度机械臂正逆解UR5机械臂仿真和代码
全桥LLC参数计算设计书(Mathcad)(含变压器开关管等器件选型)