V
主页
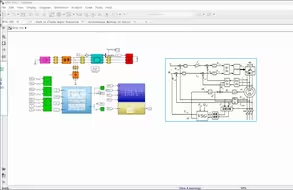
基于模糊自整定PID控制的四旋翼无人机俯仰姿态保持模型
发布人
基于模糊自整定PID控制的四旋翼无人机俯仰姿态保持模型 1、传统控制方法缺点:在强非线性、时变等不确定因素下难以取得理想的控制效果 2、改进:运用模糊自适应PID控制方法,设计无人机俯仰姿态控制律 3、引入模糊PID控制器,简化了模糊控制器输入输出初始论域的选择和解决模糊规 则的数量与控制精度之间的矛盾 4、附带报告
打开封面
下载高清视频
观看高清视频
视频下载器
基于反步法or滑膜控制orPID控制的四旋翼无人机轨迹跟踪模型
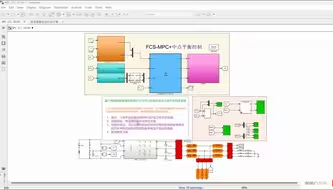
基于有限控制集模型预测(FCS-MPC)相角补偿法三电平并网逆变器
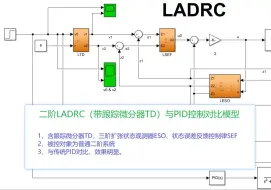
二阶LADRC(带跟踪微分器TD)与PID控制对比模型
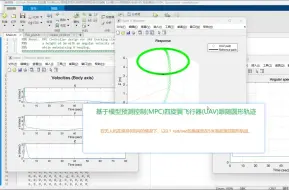
【圆形轨迹】基于模型预测控制(MPC)四旋翼飞行器(UAV)跟随控制
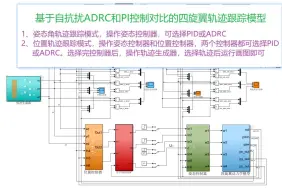
基于自抗扰ADRC和PID控制对比的四旋翼姿态角和位置轨迹跟踪模型
基于自抗扰ADRC控制的四旋翼飞行姿态控制模型
【网盘自取】平面变压器资料
基于 S 函数的 BP 神经网络 PID
PID控制四旋翼轨迹跟踪含三维图像模型
基于DSP28335单相全桥逆变入门程序学习
光伏MPPT控制模糊控制算法
基于状态空间模型预测控制的四旋翼路径跟踪实现
输入受限约束下基于NMPC的四旋翼轨迹跟踪控制
【SS拓扑】基于移相控制的磁耦合谐振无线电能传输系统仿真
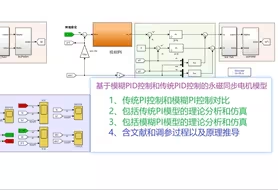
基于模糊PID控制和传统PID控制的永磁同步电机模型
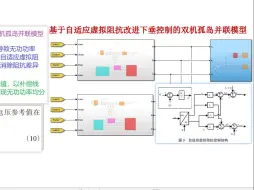
基于自适应虚拟阻抗改进下垂控制的双机孤岛并联模型
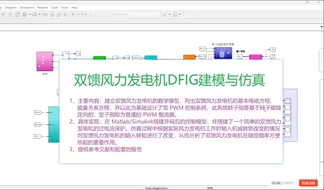
双馈风力发电机DFIG建模与仿真(含建模文档)
基于DSP28335单相逆变程序多功能版本
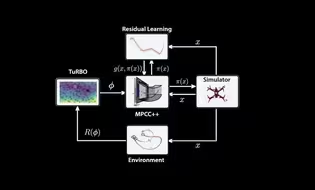
(RSS'24) MPCC++:具有安全约束的时间最优飞行的模型预测轮廓控制
基于双值比较(差值和均值)模糊控制的锂电池组SOC主动均衡
永磁同步电机控制谐波注入抑制5和7次谐波SVPWM调制改善电流
基于转子侧虚拟同步控制VSG的电压型双馈发电机DFIG模型
单相光伏储能并网PQ控制离网恒压恒频控制并离网切换含笔记和建模资料
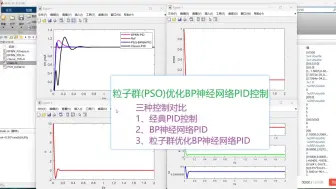
粒子群(PSO)优化BP神经网络PID控制
【混合调制】基于Plecs全桥双向CLLLC谐振变换器调频+移相混合调制仿真(二)
IPMSM凸极机弱磁控制MTPA和超前角弱磁控制仿真
基于LADRC控制位置电流双闭环和PI控制三闭环控制永磁同步直线电机PMLSM模型
CNC加工中心模拟,手机版仿真软件
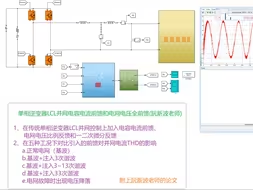
单相逆变器LCL并网电容电流前馈和电网电压全前馈(阮新波老师)
基于均值比较模糊控制的锂电池组SOC主动均衡
基于单周期控制无桥Boost型PFC
半桥LLC参数计算设计书(Mathcad)(含变压器开关管等器件选型)
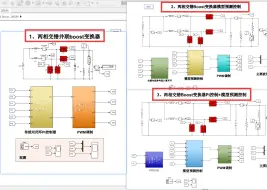
基于模型预测的两相交错并联boost变换器
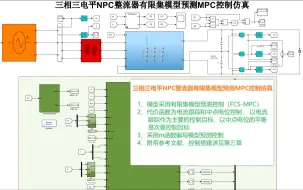
三电平NPC整流器模型预测控制mpc中点电位平衡仿真
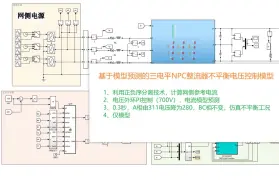
基于模型预测的三电平NPC整流器不平衡电压控制模型
【无人机作者整活】skibidi toilet episode 75 (not real) 花絮 不是真的
双容水箱自适应模糊PID控制Matlab程序(含报告)
二自由度机器人RBF网络自适应滑模控制
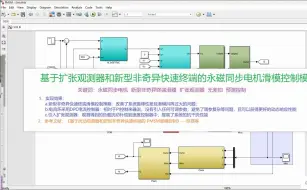
基于扩张观测器和新型非奇异快速终端滑模的永磁同步电机无差拍预测控制模型
三相不平衡电网下模块化多电平变流器MMC控制(含正负序分离控制环流抑制功率波动抑制双二阶广义积分器锁相环)