V
主页
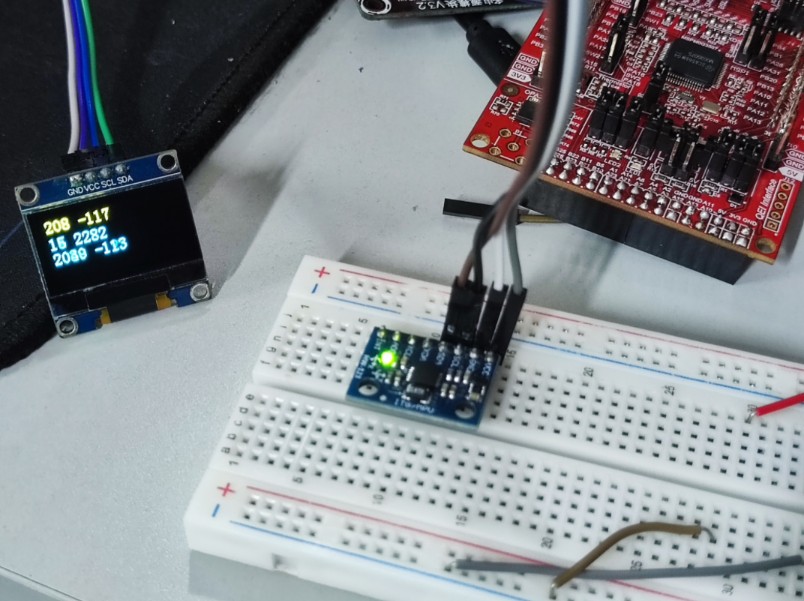
MSPM0G3507软件I2CMPU6050
发布人
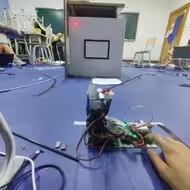
TI的m0板子移植江协的软件iic成功读取了mpu6050的原始数据,需要代码的可以评论。当然我也有姿态解算代码
打开封面
下载高清视频
观看高清视频
视频下载器
MSPM0G3507硬件I2CMPU6050,直接硬件I2CDMP读取角度太方便了
备战TI杯基于MSPM0G3507寻迹小车
震惊,电赛神器出世,既能跑yolov5,又能稳定识别多边形的maixcam,sipeed你还要藏多少东西呀
mpu6050滤波,非dmp库解算,解算出来非常稳定的yaw,没有漂移,没有静态累计误差,可移植M0端mcu
mspm0g3507的jy60陀螺仪移植
使用MPU6050+卡尔曼滤波+pid使小车走直线,几乎无漂移
耗费一个月时间没学会mspm0l1306单片机
离电赛一天,什么都不会的我be like:
电赛自动泊车系统(MSP432P401R+OPENMV)
MPU6050+DMP获取姿态解析
M0的角度闭环控制
电赛又寄,经典白忙活
2024电赛 基于mspm0g3507 PID模板(好移植,附带常用模块)
MSPM0 小车
mspm0g3507 维特智能jy61p jy901 读取欧拉角,软件置零偏航角 附下载链接
自封装MSPM0G3507的gpio库
2024年TI杯全国大学生电子设计大赛MSPM0G3507开发板宽度小于15cm的轮式小车PID闭环控制巡线原理讲解与效果演示代码开源
mpu6050读取后通过串口发送给mspm0g3507
首发价39.9元 | 基于MSPM0G3507的电赛小车解决方案 | MSPM0最小系统板 | NController多功能控制器
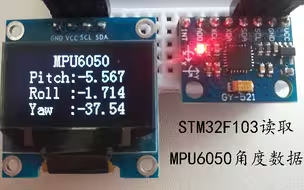
STM32读取MPU6050角度数据
2023电赛E题,封箱了,就这样吧。
对标23电赛E题!裁判反复确认我们都是大一的时候,我就知道稳了🌚
电赛备赛自己画一块电机驱动PCB
2024电赛H题通过mpu6050控制小车转角
5分钟玩转(mpu6050/陀螺仪/GY-521)角度传感器篇,附源码
使用STM32F103在keil软件下编程解算欧拉角(效果展示)
MPU6050卡死问题,已解决
2024年电赛H题,声光提示停4轮车。mspm0g3507芯片主控2024ti杯。等待完赛准备开源。
【电赛扩展模块】拒绝mspm0的中断计数,使用更优雅的i2c(iic)计数编码器
电赛备战,从使用EVM_MSPM0L1306开发板开始 - 全额返现,助你踏上夺冠之路
两轮差速版本演示 | 基于MSPM0G3507的电赛小车解决方案 | MSPM0最小系统板 | NController多功能控制器
如何处理电子陀螺仪MPU6050的零点漂移问题
MPU6050用法-角度闭环-STM32-17.2-借助MPU6050 PID闭环朝指定方向运动和旋转指定角度
mspm0g3507 读取jy61p六轴传感器角度
2024电赛TI杯MSPM0G3507小车模板,阿克曼舵机小车结构,简单移植易上手,升级的舵机版,多一份准备多一份安全
备战电赛"TI杯"控制题 M0G3507+MaixCAM开源项目
基于MSPM0 MCU的智能小车应用方案演示|盘古TI MCU系统板|MSPM0L1306|MSPM0G3507|电赛小车学习平台
2024电赛h题,33秒,mpu6050
24电赛H题,基于MSPM0G3507成功完赛
开源自制openmv图纸和PCB,可用于各种比赛,使用嘉立创完成设计,测试中性能稳定正常,需要的自取,感谢三连!