V
主页
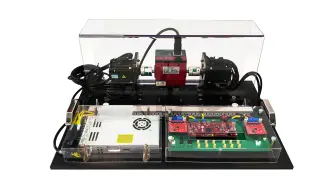
Magman平面磁力操控实验平台
发布人
欢迎来到Magman系统的展示,这是一个面向科研与教学的平面磁力操控实验平台,专为高校实验室的创新研究和教学而设计。平台由16个电磁线圈阵列构成,通过MATLAB/Simulink实现实时建模与控制。Magman能够精确操控钢制小球,这种复杂的操控方式得益于先进的反馈控制技术。 本平台提供了多样化的实验设计,涵盖了从经典到前沿的控制理论。首先,通过系统辨识与建模技术,构建了Magman的精确数学模型,并利用最小二乘法等算法对系统参数进行了优化。在此基础上,基于PID控制器的轨迹跟踪实验可以实现钢球在平面上的精确运动,学生能够通过调整控制参数来优化控制效果 为了进一步优化系统控制,我们引入了线性二次型调节器(LQR)控制和模型预测控制(MPC),这些方法通过最优控制理论提升了系统的跟踪精度,并有效减少了控制能耗。此外,实验平台还支持鲁棒控制与自适应控制的研究,通过引入外部扰动与系统参数变化,学生可以验证这些控制方法在不确定条件下的性能。 Magman平台通过实时控制和反馈,使学生能够在实验中掌握复杂的控制算法,从PID到LQR,再到MPC和自适应控制,理论与实践紧密结合,为科研与教学提供了强有力的支撑。 通过这些实验,您将深刻体会到先进控制技术在精密运动操控中的实际应用,Magman为研究人员和学生提供了一个探索新一代控制系统的理想实验平台。
打开封面
下载高清视频
观看高清视频
视频下载器
Magman平面磁力操控实验平台演示花絮
基于Matlab/Simulink实时控制的船吊实验平台 Ship-Mounted Crane
Multi-Agents 多智能体机器人实验平台
2-DOF(双自由度)排斥磁悬浮系统
基于Matlab/Simulink的Buck和Boost电路实验平台
基于Matlab/Simulink实时控制的三自由塔式吊车实验平台
基于Matlab/Simulink实时控制的三自由度桥式起重机实验平台
双机械臂实时控制系统实验平台
Pendubot 实验平台
二自由度直升机实验平台
旋转二级倒立摆控制系统(Matlab/Simulink版本)
AquaROV 声纳系统
AquaROV Assembly
基于Matlab/Simulink实时控制的六自由度并联机器人Stewart
基于Matlab/Simulink实时控制的永磁同步电机对拖加载实验平台
N100新能源实验平台
AquaROV水下机器人(Matlab/Simulink)
连续机器人轨迹跟踪
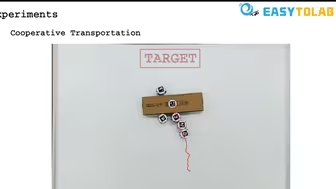
多智能体机器人协同搬运控制
ET-Motor-Kit 桌面级多电机加载实验平台
无人机水果采摘系统
三级直线倒立摆实验平台
地空异构控制系统花絮01
欠驱动机器人在柔性电缆上的控制应用
Drone Gimbal 无人机测试系统
【系统辨识 227 2020】苏黎世联邦理工—中英字幕
六自由度无人机测试系统 (Matlab/Simulink)
【2024汽车年会】大数据和人工智能:从系统辨识到AI建模 从最优控制到强化学习
地空异构多机器人协同控制系统(ET-UGADV-08)
直线三级倒立摆(Matlab/Simulink)
无人直升机编队系统 Unmanned helicopter formation system
【优化控制的数值方法 2017】弗莱堡大学—中英字幕
强冷空气难下!北方大雾散去南方大暴雨又来,广东沿海无法入秋新台风酝酿
替你试了!水火相撞的0.01秒,你会经历什么?
特大暴雨来了:大台风潭美靠近康妮殿后,危险倒槽暴雨将袭击华东
看的片是假的?野生性教育竟然骗了我们这么多年?
我把医学史做成了格斗游戏!
AI换脸有多离谱?我同时召唤出了7个我…
【你以为的二战俯冲轰炸 VS 现实中的二战俯冲轰炸】螺旋桨飞机是如何进行俯冲投弹的。
2024 bilibili超级科学晚全程回顾(上)