V
主页
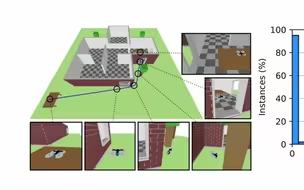
ISAR:少次目标实例分割和重新识别|2023【ETH Zurich】
发布人
Paper: https://arxiv.org/abs/2311.02734 Project page: https://nicogorlo.github.io/isar_wacv24 Code: https://github.com/nicogorlo/isar WACV 2024 paper "ISAR: A Benchmark for Single- and Few-Shot Object Instance Segmentation and Re-Identification".
打开封面
下载高清视频
观看高清视频
视频下载器
机器人大语言模型综合技能学习:从语言到奖励|2023【Google】
开源UniSim:神经闭环传感器模拟器|2023【waabi】
Figure:通用人工智能类人机器人|2023【Figure】
基于事件相机的位置识别|ICRA 2023【Queensland University of Technology】
开源图像分割Segment Anything Model|2023【MetaAI】
自动布肌肉纤维「软体机器人」|2020【迪士尼Disney】
运动规划:利用凸优化绕过障碍|2023|Science Robotics【MIT】
Simple-BEV: 多传感器BEV感知真正重要的是什么?|ICRA 2023【斯坦佛大学】
SELDA驱动的机器人腿跳跃|2022【IROS】
了解机器人的工作空间|2021【Lesics】
遥操作机器人Astra|2023【apptronik】
OpenBot:将智能手机变成机器人|2022【Intel OpenBot】
波浪式游泳机器人:两波机制|2023【以色列本古里安大学】
用于现实世界行走的个性化外骨骼|2021|哈佛大学【Science Robotics】
国产大尺寸仿鸵双足机器人 “大圣”|2023【五八智能科技(杭州)】
为工作而生「人形机器人」digit|2021【 Agility Robotics】
动力假肢TF8|2020【MIT】
从视频中学习打网球|2023【斯坦福大学】
农业采摘机器人|2023|Floating Robotics【苏黎世联邦理工学院】
学习猴子在树上荡来荡去|2022【英属哥伦比亚大学】
机器人如何学会徒步|2022|ETH Zürich【Science Robotics】
SEER:模拟情绪表达机器人|2018【東京大学】
现代即插即用机器人模块|CES 2022【韩国现代】
轮足机器人|2021|TIMA【乌克兰】
泡泡造软体机器人|2021【Nature】
复合凸轮从动机构【SIGGRAPH Asia 2021】
基于解剖学的全尺寸人形机器人|2021【Automaton Robotics】
消除站立工作痛苦的辅助服|2020【日本アルケリス株式会社】
用于可扩展电子皮肤的神经启发人工外周神经系统|2019|新加坡国立大学【Science Robotics】
谷歌AutoRT:具身智能大模型机器人大型编队|2023【Google Deepmind】
FluidLab:复杂流体操作|2023【卡耐基梅隆大学】
ViPlanner:用于局部导航的视觉语义学习 |ICRA 2024【苏黎世联邦理工学院&英伟达】
机器人从人类活动和模拟交互的视频中学习|2023【metaAI】
人类步态周期仿真|2021【Michael Whittle】
抓手机、透明试管、气球|指尖接近传感器机器人抓取|2021【日本大阪大学】
LINQ:基因组学实验室自动化解决方案|2023【英国Automata】
Barkour:四足机器人实现动物级敏捷性|2023【Google DeepMind】
软件控制烹饪的未来-3D打印机甜点|2023【哥伦比亚大学】
异构机器人团队的能量感知、无碰撞信息收集|TRO 2023【MIT】
ChatGPT for Robotics:设计原则和模型能力|2023【Microsoft】