V
主页
西北大学机器人讲座 —— 机器人学习的控制原理
发布人
2024 年 2 月 7 日 "机器人学习的控制原理 托德-D-默菲,机械工程学教授 机器人与生物系统中心 西北大学 摘要 嵌入式学习系统依靠运动合成来实现连续在线部署过程中的高效灵活学习。以学习需求为动机的运动在自然系统中随处可见,但令人惊讶的是,人们对合成运动以支持机器人系统的学习却知之甚少。学习目标带来了一系列独特的面向控制的挑战,包括如何选择措施作为目标、如何根据这些目标合成实时控制、如何对学习施加面向物理的约束,以及如何在知识有限的情况下做出保证性能和安全的分析。在本讲座中,我将讨论机器人遇到的学习任务、观测信息内容的测量方法以及生成行动计划的算法。在整个讲座中,我将使用生物学和机器人学中的实例,并以未来的挑战作为结束语。
打开封面
下载高清视频
观看高清视频
视频下载器
【基于深度强化学习的冠军级别无人机竞速】强化学习和模型预测控制MPC中英字幕18讲!
Lec8-1: Mujoco Tutorial- 仿真原理,核心模块,与机器人仿真器
实时最优控制讲座 —— 最优控制机器人软件
ETH + NVIDIA 研究 —— Orbit: 交互式机器人学习环境的统一仿真框架
UC 伯克利机器人讲座 —— 从状态空间控制到智能机器
UCSD 机器人讲座 —— 人形机器人的关键技术 + 基于模型 VS 学习的控制
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪 3D 打印教程
密歇根大学机器人讲座 —— 动力学和控制学习的一些基本限制
开源人形机器人强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布Humanoid-Gym!
宾大 GRASP 讲座 —— 机器人中的具身人工智能
CoRL 讲座 —— 用于机器人的预训练模型
CMU 机器人讲座 —— 面向大规模多智能体的智能规划(移动机器人,无人机)
密歇根大学机器人讲座 —— 机器人学中的高效通用算法
AI奇点说 | 第九期:未来走进现实,机器人开始“上岗”你准备好了吗?
宾大机器人讲座 —— 多接触操作中的学习与控制
USC 机器人讲座 —— 复杂地形上的机器人运动与感知
ETHZ 四足机器人研究 —— 学习具有风险意识的运动(ICRA 2024)
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
意大利 IIT 讲座 —— 结合学习和模型预测控制的机器人安全控制
SkiROS2 - 基于技能操作的 ROS 机器人控制平台
CoRL 机器人讲座 —— 通向通用机器人之路
ETH 讲座 —— 机器人的感知和学习:ML 最佳实践项目
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
斯坦福机器人讲座 —— 机器人技能获取: 策略表示和数据生成
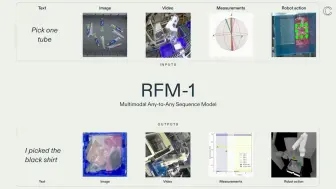
类 Sora 机器人基础模型 RFM-1:理解物理的世界模型
实时最优控制讲座 —— 改变接触条件下的轨迹优化
AI新作|英伟达:人形机器人!全身控制模式无缝转换
MIT 欠驱动机器人学 2024 第11 讲 轨迹优化 II
普林斯顿 IRoM 机器人研究 —— 自信感知: 基于学习的感知为导航提供安全保证(2024 开源)
用 ROS 2 在 Isaac Sim 中驾驶自主移动机器人
MIT 机器人讲座 —— 利用感知与 AI 增强人机交互(人与自然交互)
实时最优控制讲座 —— TrajectoryOptimization.jl 教程
USC 2024 机器人基础 第 17 讲 基于采样的运动规划 I
CoRL 讲座 - 基于仿真学习的具身智能
强推!北京大学王树森半天就教会了我深度强化学习,原理详解+项目实战,学不会来打我!
机器人模型 RFM-1 —— 让机器人和人类用自然语言交流
MATLAB - 使用 RRT 算法路径规划(官方出品)
CMU 最优控制 2024 助教补充 第 5 讲 动态规划与 MPC
CMU 机器人讲座 —— Where's RobotGPT
ICRA 2024 CNRS-AIST 研究 —— 利用结合快速密集 3D 跟踪和 SLAM 的广角深度图像进行人形机器人定位操作