V
主页
KAIST开源|首次引入TGF,可同时执行地面检测和物体聚类!
发布人
对于自主导航而言,从3D点云中感知可穿越区域和感兴趣的物体是关键任务之一。一辆地面车辆需要寻找可以用车轮探索的可穿越地形。然后,为了做出安全的导航决策,必须先对位于这些地形上的物体进行分割。然而,过度分割和欠分割可能会对这种导航决策产生负面影响。为此,我们提出了TRAVEL,它使用3D点云的图表示来同时执行可穿越地面检测和物体聚类。为了分割可穿越地面,将点云编码为图结构,三格场,将每个三格场作为一个节点。然后,通过检查连接节点的局部凸性和凹性来搜索和重新定义可穿越区域。另一方面,我们的地上物体分割采用图结构,将水平相邻的3D点在球面投影空间中表示为一个节点,并将节点之间的垂直/水平关系表示为一条边。完全利用节点-边结构,地上分割确保实时操作,并减少过度分割。通过使用仿真、城市场景和我们自己的数据集进行实验,我们已经证明,我们提出的可穿越地面分割算法在传统指标方面优于其他最先进的方法,并且我们新提出的评估指标对评估地上分割具有重要意义。 论文地址:https://arxiv.org/abs/2206.03190 代码地址:https://github.com/url-kaist/TRAVEL
打开封面
下载高清视频
观看高清视频
视频下载器
1.2 如何快速学习开源代码?
手把手教你编译运行VINS代码
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!
ECCV2022|任意两帧之间均可插入,可实现27倍视频加速处理!旷视等最新开源
牛津大学发布!可扩展激光雷达NeRF SLAM,时间节省一半!
IROS22|动态环境下,资源受限机器人的惯性里程计!哈工大最新开源!
哈工大、北师大、清华开源!逼真的3DGS人体化身
手把手带你入门SLAM
IMU选型、标定误差分析、AHRS组合导航
ETHZ最新发布X-ICP 极端环境下鲁棒的激光雷达配准
上海交通大学博士分享基于神经隐式表征的语义SLAM(下)
手把手教你调试代码!gdb调试入门(4)常用指令演示-条件断点
机器狗来帮你装扮圣诞树了!祝大家圣诞节快乐!
成本降低2倍,用于提高视觉变换器的自适应令牌采样!微软等最新开源,ECCV2022!
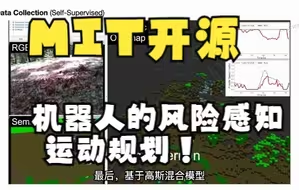
MIT最新开源|野外环境下,机器人的风险感知运动规划!
【直播回放】让机械臂自己学会6自由度抓取操控,代码已开源!
有效处理遮挡、反光等问题,接近实时的三维重建!英伟达即将开源,CVPR2023!
Python两行代码破解wifi密码,十秒一键畅连,堪比Wifi万能钥匙,值得收藏!!
【直播回放】SLAM学习入门经验分享
【直播回放】学习大礼包
武汉大学博士生分享算法面向室内SLAM场景的点云超分辨率算法(上)
经验分享:我的SLAM学习之路-答疑交流
华盛顿大学与英伟达联合开源!用于大规模仿真环境和机器人运动控制
关于我做了一个代码大战cat(第4集)
密歇根大学开源”本体感觉不变的机器人状态估计”
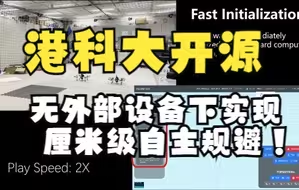
无外部设备下,可实现厘米级自主规避!港科大&大疆新开源!
史蒂夫神了?!Scratch编程创作我的世界Minecraft
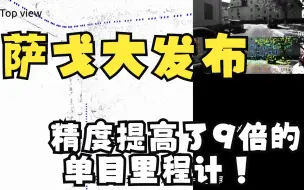
精度提高了9倍,允许结合多视角深度信息的单目里程计!萨戈大发布
如何学习S-MSCKF,以下几点建议送给你!
会叶问蹲、会俯卧撑的机器人,Booster T1完美复刻人类动作,灵活丝滑。
手把手教你调试代码!gdb调试入门(6)常用指令演示-分析程序奔溃原因
【直播回放】武汉大学开源SLAM详解!低成本轮式机器人定位算法 Wheel-INS
快速流畅!人工智能ROS小车雷达导航、路径规划、虚拟仿真、slam导航算法
流浪地球2的硬核科技,它能实现吗?
仅需一张图片和音频,一键即可控制说话风格!清华最新发布,AAAI2023!
【Python爱心代码】教你用几行Python代码运行一颗炙热的心!赶快给你身边的人安排起来!表白必备技能~~
皓月当空以秋月兮,伴万里而鹏程。计算机视觉life祝大家中秋快乐!
RGBD稠密重建开山之作-KinectFusionLib代码解析(下)
对发电厂的自主探索丨以多传感器激光雷达为中心的高精度里程计和三维地图实时绘制方案
华科、华为联合开源!实时动态场景4D高斯泼溅,最高 82fps!