V
主页
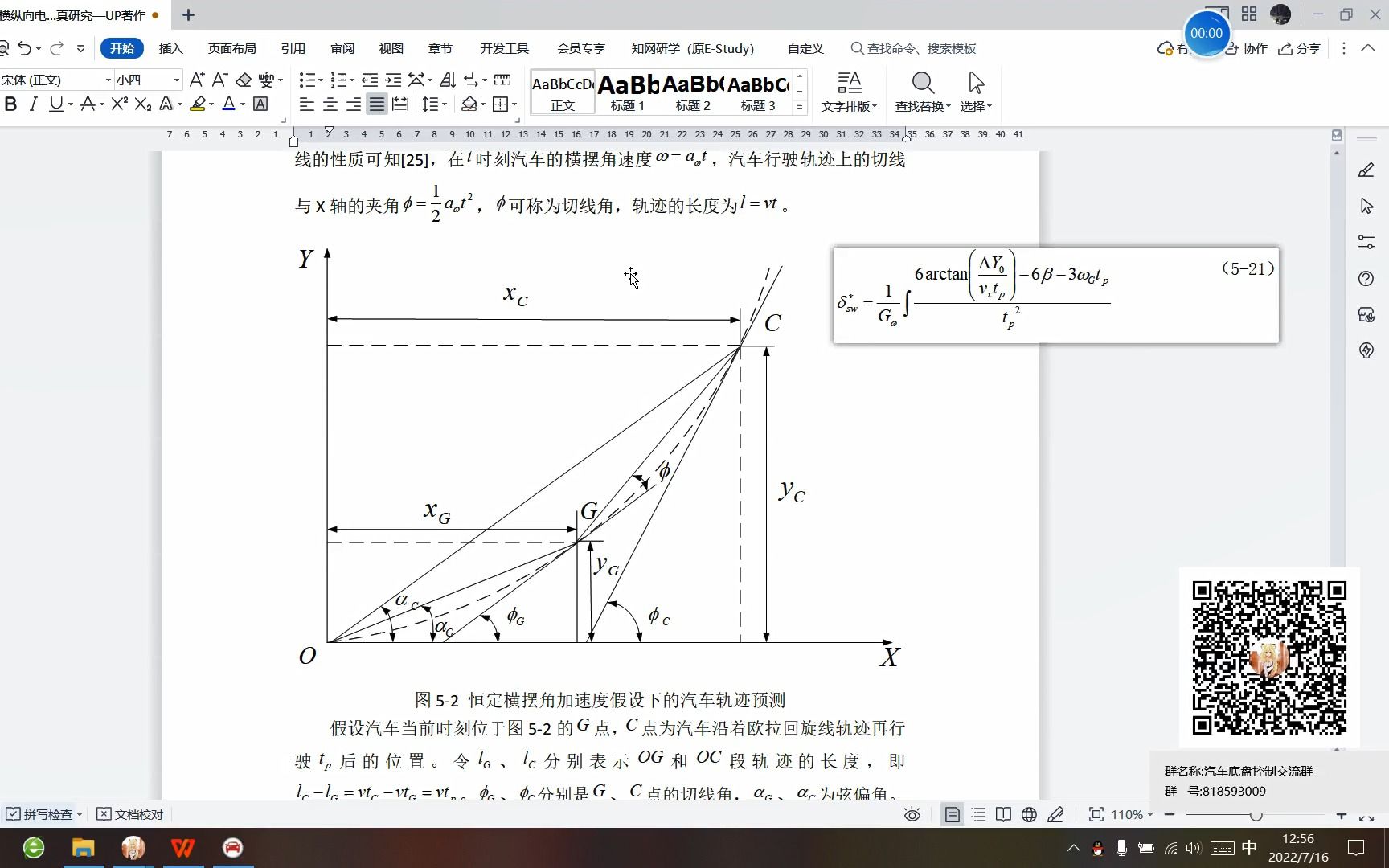
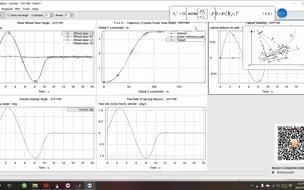
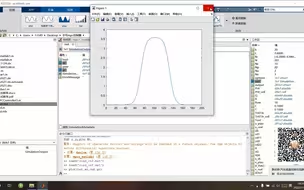
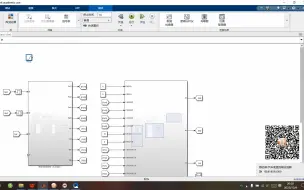
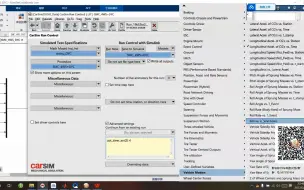
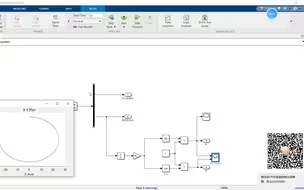
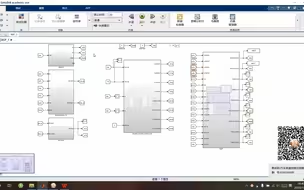
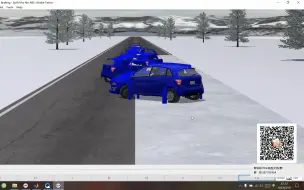
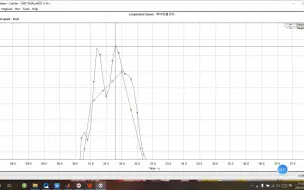
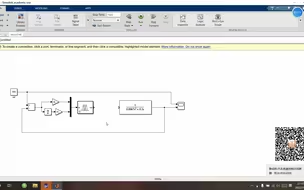
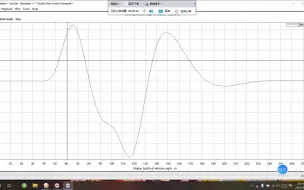
Carsim和Simulink联合仿真轨迹跟踪教程保姆级教程三:基于恒定横摆角加速度假设的单点预瞄驾驶员模型的实现
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
Carsim与Simulink联合仿真——分布式电驱动汽车模糊直接横摆力矩控制
Carsim和Simulink联合仿真轨迹跟踪教程保姆级教程四:基于恒定侧向加速度假设的单点预瞄驾驶员模型的实现
基于动力学模型的模型预测控制(MPC)轨迹跟踪算法Carsim和simulink联合仿真实现
Carsim和simulink联合仿真的汽车系统动力学问题
无人驾驶汽车滑模控制四轮转向论文复现(Carsim-Simulink联合仿真)
Carsim和simulink联合仿真汽车动力学问题
卡尔曼滤波(轨迹速度跟踪)MATLAB和Simulink联合仿真
自动驾驶控制算法:Carsim和Simulink联合仿真实现LQR最优控制轨迹跟踪策略(多种复杂道路均可)
Carsim和Simulink联合仿真轨迹跟踪教程保姆级教程一:基于恒定横摆角速度假设的单点预瞄驾驶员模型的实现
Carsim和、Simulink联合仿真轨迹跟踪保姆级教程二:基于恒定横摆角速度假设并考虑稳态质心侧偏角增益的单点预瞄驾驶员模型的实现
基于运动学模型的模型预测控制(MPC)轨迹跟踪纯MATLAB.m文件代码实现
基于运动学模型的模型预测控制(MPC)轨迹跟踪MATLAB代码实现
无人驾驶汽车非奇异终端滑模控制轨迹跟踪论文复现(第二版有声音)
carsim和simulink联合仿真实现——预瞄距离自适应跟踪算法
魔术轮胎公式联合工况simulink建模
Trucksim与Simulink联合仿真-基于预瞄理论的运动学模型轨迹跟踪控制
滑膜控制算法在汽车驾驶员模型中的应用(Carsim和Simulink联合仿真)
无人驾驶汽车滑模控制四轮转向论文复现(轨迹跟踪和滑模控制四轮转向集成控制器)
分布式电驱动汽车非线性七自由度车辆模型建立1:动力系统及纵向驾驶员控制
无人驾驶汽车非奇异终端滑模控制轨迹跟踪论文复现(Carsim和Simulink联合仿真)
Carsim和simulink联合仿真的汽车系统动力学问题
Carsim和Simulink联合仿真实现——ABS逻辑门限PID反馈液压控制
Trucksim与Simulink联合仿真-动力学模型验证
基于运动学模型的模型预测控制(MPC)轨迹跟踪理论公式推导
Carsim和Simulink联合仿真实现——ABS(防抱死)和ASR(驱动防滑)集成控制
Carsim和simulink联合仿真——实现ABS逻辑门限值控制
Carsim和simulink联合仿真——实现分布式电驱动汽车四轮转向横摆力矩集成滑模控制
UP书本第五章--横向偏差PID轨迹跟踪控制器
如此简单的曲线拟合:MATLAB曲线拟合工具生成拟合公式和自定义公式进行拟合
分布式电驱动汽车非线性七自由度车辆模型建立2:道路信息及横向轨迹跟踪驾驶员控制
基于MPC模型预测控制的五次多项式轨迹跟踪
MATLAB APP designers实例4设计simulink、APP、MATLAB数据交互
AEB联合仿真实现
Carsim和Simulink联合仿真实现——AEB算法
Carsim和simulink联合仿真——实现ABS功能(轮毂电机制动)
参考轨迹及其控制器设计所需信号计算教程MATLAB
模糊PID控制器MATLAB设计流程
Carsim车辆制动能量回收
如此垃圾的模糊PID控制效果
Carsim数据输出与曲线查找