V
主页
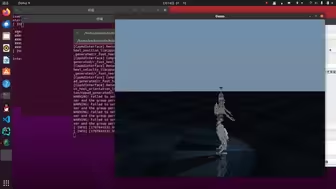
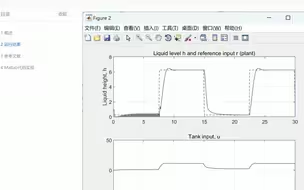
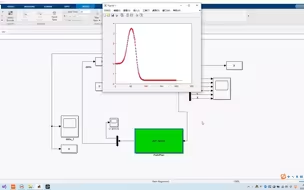
小车倒立摆最优控制教程 - Part3 NMPC非线性模型预测控制以及在Simulink Simscape仿真验证
发布人
视频全部原创。这期是小车倒立摆最优控制这个系列第三期视频,主要讲解一下NMPC控制,包括matlab里如何运用CasADi工具包进行最优控制复现和在simulink simscape multibody里的仿真验证。 (今晚上传nmpc文件)Github开源仿真文件: https://github.com/junhengl/Cart_Pole_Simulink.git CasADi优化工具包:https://web.casadi.org/get/
打开封面
下载高清视频
观看高清视频
视频下载器
小车倒立摆最优控制教程 - Part4 利用LSTM神经网络学习NMPC控制器实现实时控制
小车倒立摆最优控制教程 - Part1 Simulink Simscape Multibody仿真建模
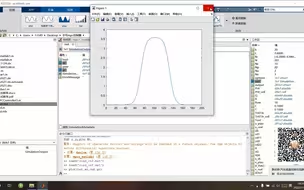
基于Casadi在Matlab环境中开发的基础模型预测控制器
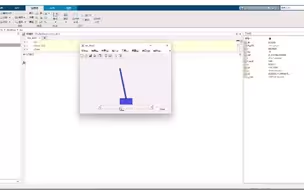
小车倒立摆最优控制教程 - Part2 动态推导,LQR控制器设计以及在Simulink Simscape仿真验证
手把手带你实现MTALAB/simulink的模糊PID控制器(与传统PID做对比)
基于运动学模型的模型预测控制(MPC)轨迹跟踪MATLAB代码实现
MPC 模型预测控制第一讲
【开源软件】MPC控制,有机械狗、机器人、机械臂、倒立摆的模型,非常方便大家学习控制和机器人技术的,推荐给大家使用
【MPC模型预测控制器】1_最优化控制和基本概念
LQR倒立摆 从建模到控制 零基础都能复现
小车倒立摆的simscape仿真+讲解版
[学术讲座]基于Matlab和Casadi的模型预测控制及系统状态估计Part3
开源!ROS C++实现的NMPC和LMPC轨迹跟踪
模型预测控制(MPC)
关于MPC和NMPC的几个小demo
octave/ Matlab 的倒立摆的 LQR 控制教程
NMPC+WBC+mujoco仿真 12自由度双足人形机器人行走控制
模型预测控制(2022春)lecture 1-1 Unconstrained MPC
MATLAB直线倒立摆一阶倒立摆LQR控制仿真
基于动力学模型的模型预测控制(MPC)轨迹跟踪算法Carsim和simulink联合仿真实现
matlab一阶直线倒立摆
【新进展】双足机器人凸模型预测控制(convexMPC)+全身控制(WBC)双足站立 MATLAB Spatial V2 仿真
你还在用PID?MPC模型预测控制,从公式到代码!
【新进展】双足机器人在Simscape Multibody仿真上的表现 MPC+WBC走动和跑动步伐
从模型预测控制到强化学习-2:非线性MPC的求解与应用(PPT高清版)
CasADi 3.6 tutorial (C++ Matlab Python)
nmpc求解器-代码讲解
使用非线性MPC进行车辆路线跟踪
基于运动学模型的模型预测控制(MPC)轨迹跟踪纯MATLAB.m文件代码实现
ACADO生成NMPC代码,贼拉快!
课程1-倒立摆优化控制问题的理解
Hector人形机器人运动控制开源仿真Simulink Simscape & MPC - 1. 简单上手介绍
非线性模型预测控制MPC问题求解研究(Matlab代码实现)
非线性MPC设计了解模型预测控制,第8部分
自动驾驶控制-非线性Nmpc跟踪双移线路径
史上最糟糕的无人车模型预测控制(MPC算法)轨迹跟踪控制入门必学爆品课程(精简版)
基于模糊控制算法的倒立摆控制系统matlab仿真
基于非线性模型预测控制的目标跟踪约束 NMPC matlab无人机算法
【手把手建模】LQR控制器的MATLAB /Simulink的实现(附详细代码)
【控制】模型预测控制 MPC 【合集】Model Predictive Control