V
主页
京东 11.11 红包
通用抓取 ----2D图像分割
发布人
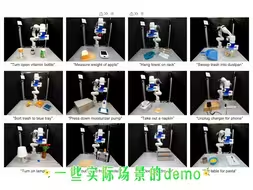
2D 图像分割在机器人操作中的重要性体现在为后续的物体位姿估计和抓取位姿估计提供了基础支持。在基于模型的机器人抓取与操作过程中,机器人需要精确地识别出目标物体的位置和形状,这就是图像分割的主要作用。通过分割算法,机器人可以从复杂的场景中将目标物体分离出来,生成物体的掩码或轮廓,以供后续的操作决策。
打开封面
下载高清视频
观看高清视频
视频下载器
李飞飞团队最新成果,基于大模型的机械臂抓取
具身智能-通用抓取综述(model base 3D视觉派)
转个魔方
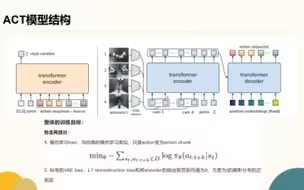
斯坦福ACT算法原理2-ACT模型
具身智能课程-pybullt仿真器学习第一课
具身智能-通用抓取综述(learningl base 端到端派)
具身智能技术综述上
0基础学习具身智能第一步,仿真数据使用
30元教你学会用Issac gym训练宇树机器狗试听第一期
具身智能课程-pybullt仿真器学习第三课搭建自己的具身智能学习平台
Aloha-ACT 在单臂上模仿学习仿真系统(基于Coppliasim+RLBench)
具身智能领域最容易落地的方向-遥操作
0基础学习具身智能第一步,选择自己的仿真平台
具身智能综述下
斯坦福ACT算法原理1-生成式模型(具身智能)
入门机器人Diffusion Policy
【论文分享】GR-2和何恺明具身智能首作
新品上市!逐际动力发售首款多形态双足机器人TRON 1
泰山惊现机器狗搬运工
星尘机器人预告片全面解读-最强柔顺人形
具身智能常用AI工具-必看
全网最专业Figure 02视频讲解
具身智能基础简述
全网首个灵巧手课程-灵巧手综述
具身智能课程-pybullt仿真器学习第二课
星尘智能全能家居宣传片全网最全技术亮点解读
我跟你们这群研究机械臂的拼了!竟然连体感追踪都整上了
遥操作库Humanoid Arm Retarget详解(作者王文灏主讲)
智元机器人发布会专业全解析-20分钟带你了解稚辉军新品
客户案例 | 基于松灵RANGER MINI 3.0底盘的双臂升降式具身智能平台的无限可能
30元教你学会用Issacgym训练宇树机器狗试听第二期
具身智能 | 英伟达:大规模厨房仿真数据
Meta AI 推出新一代SAM 2 可实时在图像或视频中识别出特定对象并进行跟踪
斯坦福ACT算法原理3-面试经验
灵巧手遥操作
具身智能公司-大疆
轮足焕新!TRON 1「一机三用」之双轮足形态
Arduino导弹防御雷达系统教程
最佳论文!Robotwin:首个双臂协同机器人策略学习Benchmark
AI新作 | ALOHA赋能机器人模仿学习复杂任务