V
主页
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
发布人
https://www.youtube.com/watch?v=xH5iIoF0hmA SafeSteps: Learning Safer Footstep Planning Policies for Legged Robots via Model-Based Priors. (Humanoids 2023) Shafeef Omar, Lorenzo Amatucci, Victor Barasuol, Giulio Turrisi, Claudio Semini. Abstract: We present a footstep planning policy for quadrupedal locomotion that is able to directly take into consideration a-priori safety information in its decisions. At its core, a learning process analyzes terrain patches, classifying each landing location by its kinematic feasibility, shin collision, and terrain roughness. This information is then encoded into a small vector representation and passed as an additional state to the footstep planning policy, which furthermore proposes only safe footstep location by applying a masked variant of the Proximal Policy Optimization algorithm. The performance of the proposed approach is shown by comparative simulations and experiments on an electric quadruped robot walking in different rough terrain scenarios. We show that violations of the above safety conditions are greatly reduced both during training and the successive deployment of the policy, resulting in an inherently safer footstep planner. Furthermore, we show how, as a byproduct, fewer reward terms are needed to shape the behavior of the policy, which in return is able to achieve both better final performances and sample efficiency. For more information, visit: https://iit-dlslab.github.io/papers/omar23humanoids.pdf
打开封面
下载高清视频
观看高清视频
视频下载器
MPC and RL, two different roads to legged locomotion, and that's OK
还得是东大,似曾相识的一跃😂
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
波士顿动力也上强化学习了,很强!Reinforcement Learning with Spot _ Boston Dynamics
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
人形机器人足底机械结构设计
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
Reinforcement learning for blind stair climbing with legged and wheeled robot
SLoMo: A General System for Legged Robot Motion Imitation from Casual Videos
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion
(RA-L 23) Reactive Landing Controller for Quadruped Robots
(ICRA 2024) Actor-Critic Model Predictive Control
IHMC Atlas walking through a hatch holding a fire hose
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
An Efficient and Versatile Framework for Multi-Contact Optimal Control
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
The MIT Humanoid Robot Design Motion Planning and Control ForAcrobatic Behaviors
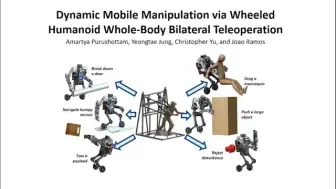
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
Whole-body MPC for highly redundant legged manipulators
(Humanoids 22)半人马机器人爬上 0.3 m 的平台,手臂上承载 17 kg 的有效负载
通过对抗运动先验学习四足机器人的双足行走
(Talk ICRA 2024) Actor-Critic Model Predictive Control
真牛!这个人形机器人吊打很多厂家的“产品”
The legged robot whole-body State RVIZ plugin
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
Contact-Implicit MPC: Controlling Diverse Quadruped Motions Without Pre-Planned
人形机器人灵巧手臂最新成果
Dynamic Planning, forwards, backwards, and sideways on Stairs
Boston Dynamics Atlas好矮啊
(T-RO 23) An Efficient Paradigm For Feasibility Guarantees For Legged Robots
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
Combining Learning-Based Locomotion with Model-Based Manipulation for Legged
Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Wheeled Humanoid
Pedipulate_ Enabling Manipulation Skills using a Quadruped Robot's Leg
(Humanoids 2022)Continuous Jumping of RAMIEL Using Reinforcement Learning
幽灵机器人 Ghost Robotics - Vision 60