V
主页
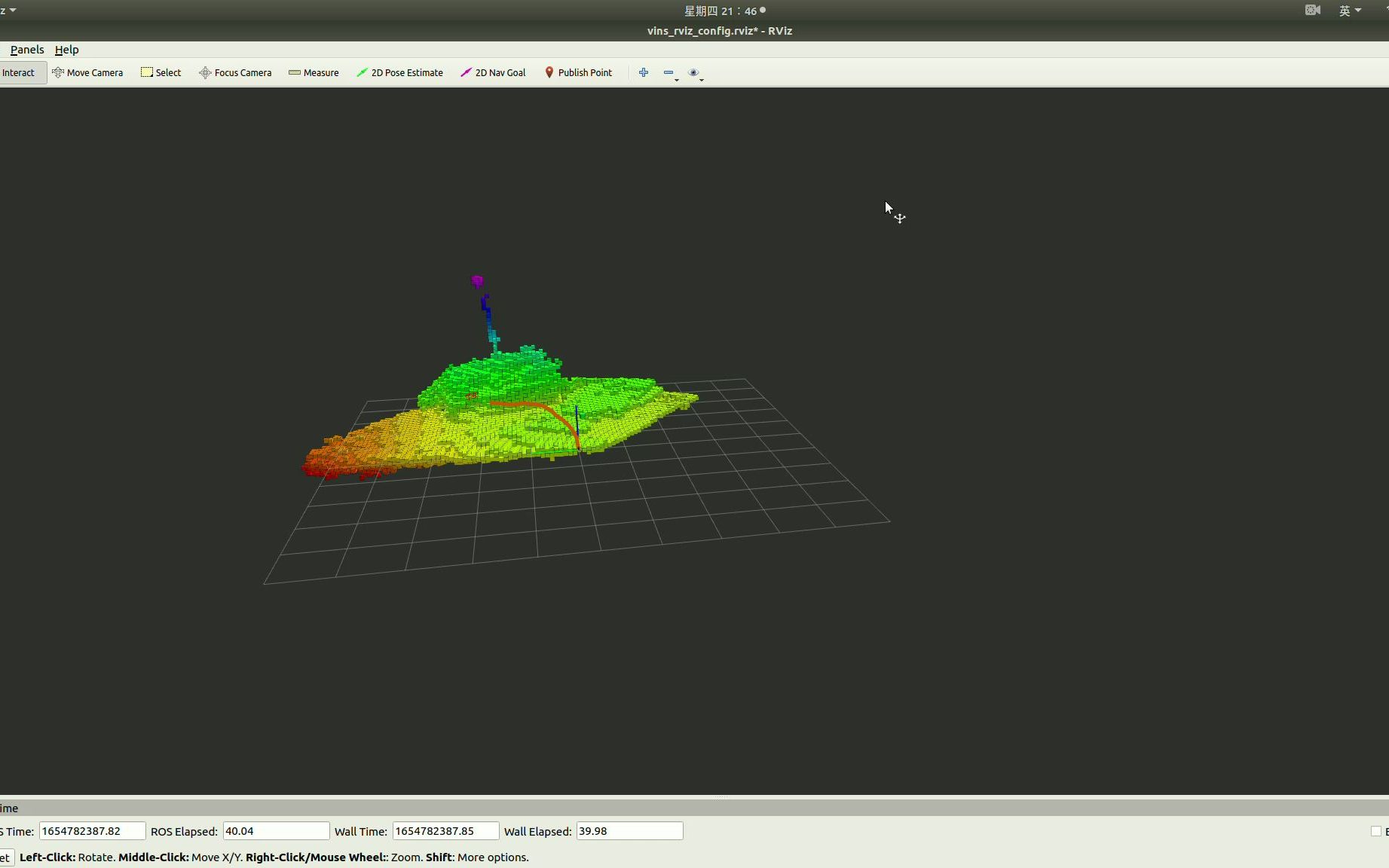
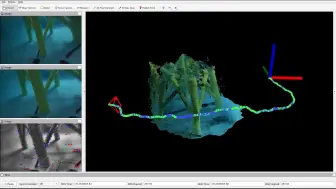
vins_fusion加占用栅格地图测试
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
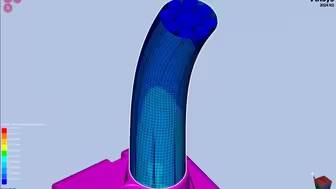
ANSA联合ABAQUS小球冲击分析
组合优于继承(go&rust都是这种设计)
LIO-SAM矿洞环境下无人车仿真测试
ROS机器人基于gmapping的slam自动导航建图!
无人机仿真测试
[IROS 2024] AS-LIO: 空间交叠度指导的自适应滑窗激光惯性里程计
【开源无人机】Vins_fusion代码讲解
ORB-SLAM2究竟是什么
基于多智能体强化学习的多小车建图与导航
嵌入式linux项目,复刻IPhone相机测距功能 ,单目相机+IMU,Vins-mono slam,应用开发,驱动,RK3568,AR
滑铁卢大学发布! 迈向实时的高斯平滑:通过光度SLAM加速3DGS
TRLO: An Efficient LiDAR Odometry with 3D Dynamic Object Tracking and Removal
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
IGE-LIO:充分利用强度信息克服激光退化场景下的定位精度
基于yolo和moveit的图像识别机械臂目标抓取搬移
使用相机在ROS下的TensorRT量化推理yolo模型以及使用BYTEtrack算法进行目标跟踪部分的更新
宇树K1机械臂的视觉抓取仿真
End-to-End视觉里程计新突破:从运动模糊图像中精确估计相机姿态
[ICRA 2024] GCM
【考核用】调用opencv识别aruco码,在ros中更新tf
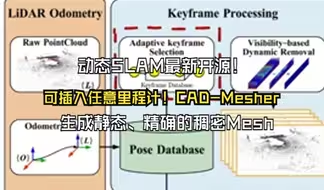
动态SLAM最新开源!可插入任意里程计!CAD-Mesher:生成静态、精确的稠密Mesh!
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——高精度】“实测”
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
存档毕设
SLAM与三维重建的区别
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
C6-2智能车的建图与自主实现教程
【SLAM】【VIO】双目视觉+超强三维感知力【功能演示——半稠密点云】“实测”
调车总不能炸机了吧(●'◡'●)
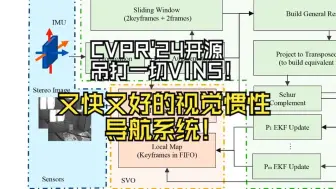
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
套件课程--LIO-SAM的介绍和使用
6分钟简述K8S的架构原理
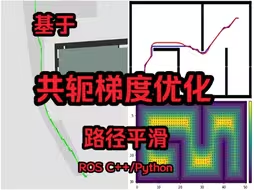
路径平滑|基于共轭梯度法的轨迹优化(ROS C++/Python)
带 SLAM 和 Nevegation2 的 ROS2
案例:Ansys Motion线缆刚柔耦合动力学仿真
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——鲁棒性强】“实测”
基于ROS双臂协同的智能物流搬运系统
强推!【SLAM核心算法】中科院博士一口气带你学完无人驾驶:原理、激光、无人机、VR、传感器、计算机视觉!(人工智能、深度学习、机器学习、神经网络、图像处理)
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”