V
主页
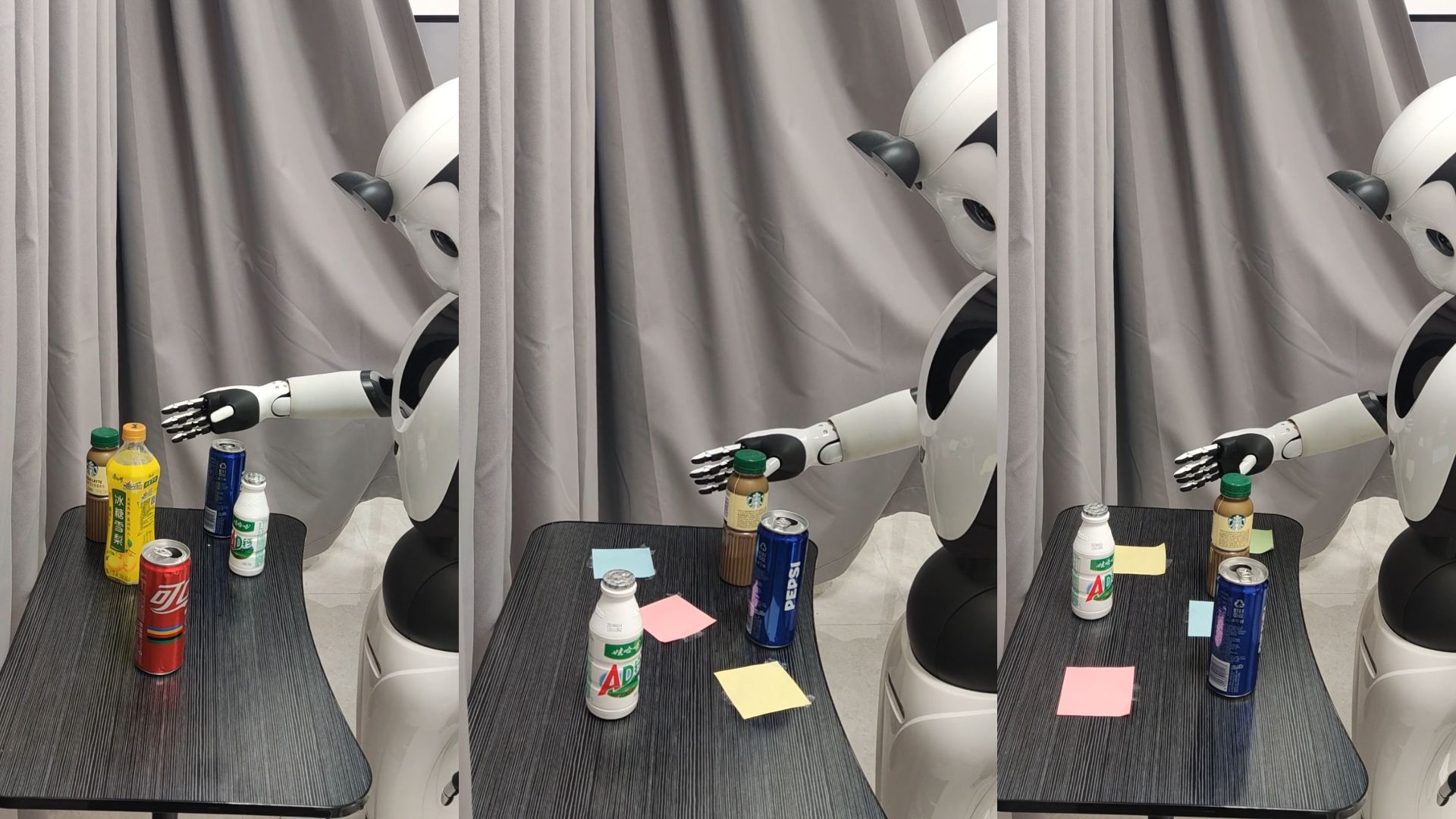
NeurIPS'24 | 原语驱动的世界模型 PIVOT-R实现任务泛化与效率双重 提升,成功率超过谷歌RT-1 26.6%
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
众擎——旗舰级ENGINEAI SE01人形智能体
ECCV'24 Oral | MVSplat:从稀疏多视图图像中实现高效的3DGS,用更少的参数,速度快2倍,还能跨数据集泛化
人工肌肉驱动的人形机器人|2024【Clone】
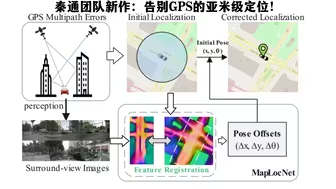
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
UCSD、MIT华人团队开源Open-TeleVision:沉浸式体验跨越3000里的机器人远程操作。
IROS'24 南开大学 | 通过动态拓扑图上的Voronoi划分实现快速且通信高效的多无人机探索
RobotKeyframing:四足机器人学习高层次目标的运动|2024【迪士尼】
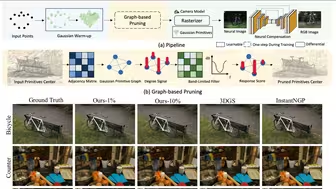
浙大、上海人工智能实验室等即将开源PGSR: 平面3DGS提升表面几何,超越 2DGS、GOF,实现渲染新高度
11月新品上线 | 随从臂“眼在手上”整机版本&夹爪摄像头组件重磅推出!
新时代降临!多模态大模型的训练范式都有啥?
“星期三”开箱大揭秘!
《西部世界》重现!机器人复刻人类肌肉骨骼,惊悚科幻震惊网友
【Tokyo Robotics】人形机器人Torobo通过深度预测学习掌握擦桌子技能
AI奇点说 | 第九期:未来走进现实,机器人开始“上岗”你准备好了吗?
Nvidia具身最新成果:GR00T-Control引领人形机器人智能控制
NVIDIA Isaac ROS 3.0:重塑机器人未来
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
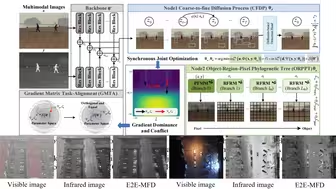
NeurlPS 2024 Oral | E2E-MFD 迈向端到端同步多模态融合检测 为智驾实现同步优化与性能提升
李飞飞团队佳作不断:聚焦机器人抓取交互,让机器人操作真正地适应各种环境
ECCV'24 | Gaussian Grouping解决3DGS的对象级场景理解问题,实现3D场景任意分割和编辑
讲座 | 构建通用可泛化的自动驾驶世界模型——香港科技大学在读博士高深远
ICRA'24 | FCMW:"四旋翼无人机的智能失控预警":FCMW助力无人机提升飞行安全性。
谷歌刚刚推出了AI“UNBOUNDED”——游戏的下一个进化
Dobb·E 一个开源的家庭机器人操作臂端到端学习训练框架
【熟】为什么验证码越来越难了?【WSJ】
IROS'24 普渡大学、麻省理工学院 | 5自由度触觉夹持器,性能匹敌仿生手,实现高效精确操控
ECCV'2024 北航、极氪领衔 | FSD-BEV:大幅度提升基于视觉的3D目标检测算法性能,实现感知新SOTA!
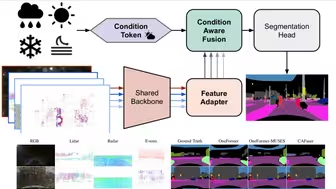
ETH新作CAFuser:条件 感知多模态融合 ,实现对 驾驶场景的稳健语义感知,多个下游任务SOTA!
RLBench官方教程1——界面和代码框架介绍
Torobo 机器人和灵巧手仿真展示
NeurIPS'24 | DHD: 多无人机协同感知框架,提升 目标轨迹预测的准确性和全面性
【波士顿动力】中文字幕|Spot Watches Its Step | Boston Dynamics
谷歌pixel5使用体验分享
产品墓园:Google 谷歌 - 软件篇
清北学子创办,自变量机器人完成亿元级融资
ACM SIGGRAPH Asia 2024 | RobotMDM:机器人运动扩散模型:机器人角色的运动生成
手写DiffusionPolicy【1】:最简单的机器人操作
谷歌Pixel10新机将发布,全新纯直屏+后置三摄,预计1500美刀!
一部智能手机的价格就能买一只家用机器狗?!蔚蓝科技发布全球首款面向家庭陪伴的人工智能四足机器人BabyAlpha A2,具身智能时代,未来每个家庭都会有机械宠物
逆天了!苹果AI不翻墙直连谷歌识图