V
主页
基础滑模控制-基于趋近律
发布人
参考文献: 1、高为炳. 非线性系统的变结构控制. 自动化学报, 1989, 15(5): 408-415. 2、Utokin V I . Variable Structure System with Sliding Mode[J]. IEEE Trans on Ac, 1978. 3、Hamed Rabiee, Mohammad Ataei, Mohsen Ekramian,Continuous nonsingular terminal sliding mode control based on adaptive sliding mode disturbance observer for uncertain nonlinear systems,Automatica,Volume 109,2019,108515,ISSN 0005-1098,https://doi.org/10.1016/j.automatica.2019.108515. 滑模控制的GitHub地址: https://github.com/XernicRose/basic_sliding_mode_controller_lib
打开封面
下载高清视频
观看高清视频
视频下载器
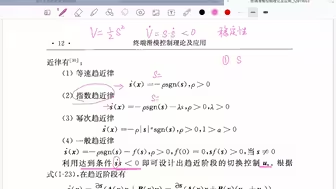
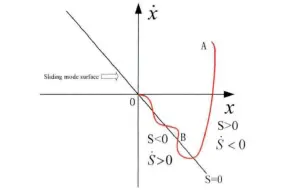
滑模变结构控制的原理,趋近率
滑模控制简单思想和推导一
滑模控制思想推导二
滑模控制【讲清原理】-1
1、滑模控制的基本原理
什么是滑模控制
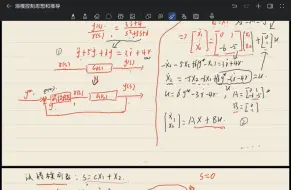
5、滑模观测器的基本原理(从龙伯格到滑模)
滑模控制算法的理论
滑模控制基本概念,非线性系统控制器设计以及simulink仿真初步
无人驾驶汽车滑模控制四轮转向论文复现(Carsim-Simulink联合仿真)
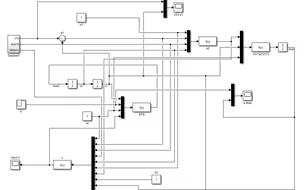
S-Function/S函数补充,滑模控制器完整搭建
滑模控制应用完结
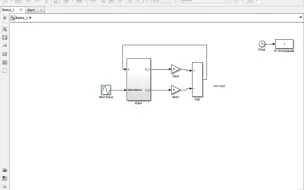
手把手教你在Simulink中实现滑模控制系统搭建——从物理模型到滑模控制器到Simulink实现(简单案例,详细操作)
8、自适应鲁棒滑模控制原理
《终端滑模控制理论及应用》1
12、四种常用高阶滑模控制器的性能比较
9、滑模控制常见的抖振抑制方法
永磁同步电机滑模观测器设计 (7)
滑模制导控制律
非线性控制理论A Ch1 introduction-1
Matlab和控制理论(十)滑模控制器原理和柔性体控制
(自适应)滑模控制-从入门到制导实战
滑模鲁棒控制以及simulink仿真
非线性控制理论(2022春) 1-1 Introduction
永磁同步电机矢量控制优化思路-ADRC(自抗扰控制)与SMC(滑模控制)
4、简单的鲁棒滑模控制设计
滑模控制简介:基础知识
超扭曲滑模控制!抖不了一点儿!
Matlab和控制理论(二十六)汽车悬架滑模控制
PMSM_FOC控制入门—从两个变换到高阶滑模系列视频(完结)
SMO滑模观测器入门/Sliding Mode Observer/本科毕设
非线性反步法、自适应控制器以及simulink仿真(讲解细致,超容易理解,小刻都听得懂doge)
可变结构控制系统(台湾交通大学 陈永平)
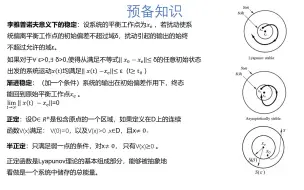
非线性自适应控制预备知识(Lyapunov稳定性)
MATLAB进阶讲解-第13讲-滑模-变结构滑模控制-直流电机滑模-陈诚电气
基础滑模控制14种模型的simulink仿真分享
7第五章-速度环的滑膜控制原理与仿真
滑模面选择及浅讲多变量控制
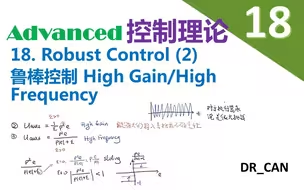
【Advanced控制理论】18_Robust Control (2)_鲁棒控制_High Gain_High Frequency
基于反步法的四旋翼滑模控制MATLAB仿真