V
主页
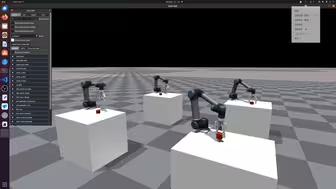
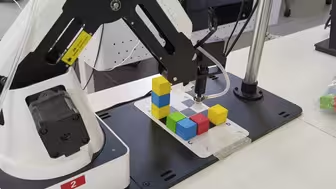
4K光追的强化学习——IsaacSimLab(Orbit)测试
发布人
Isaac Lab版代码已经更新到github https://github.com/NathanWu7/isaacLab.manipulation
打开封面
下载高清视频
观看高清视频
视频下载器
基于深度强化学习的slam(同时还跑了一个暂时没用的语义分割)
Isaacgym一些自建RL环境的演示
强化学习,启动!
RLBench机器人模仿学习大规模测试框架——任务展示
PEGG-Net Isaac Sim Demo
《关于大一新生做的抓取物体机械臂这档事》
基于stm32和openmv的视觉机械臂.
【Python】人形机器人——强化学习
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
右边两足走路也是双足行走
当您同时拥有外骨骼和灵巧手,你就能
【Tokyo Robotics】人形机器人Torobo通过深度预测学习掌握擦桌子技能
强化学习+模仿学习实现简单的机器人导航
RLBench官方教程1——界面和代码框架介绍
测试行走站立切换和站立抗冲击
自制光学触觉传感器
Decaying Action Priors for Accelerated Imitation Learning of Torque-Based Legged
微型六轴机械臂测试
强化学习魅力时刻
全网最低成本—具身智能机械臂+实操课程
TITA强化学习迁移
“环面蜗杆针轮减速器”机械臂早期测试
用Isaac Lab和OpenUSD加速机器人学习
太完整了!我居然3天时间就掌握了【机器学习+深度学习+强化学习+PyTorch】理论到实战,多亏了这个课程,绝对通俗易懂纯干货分享!
【揭秘】五指灵巧手DexHand021 产线组装的秘密
【真机演示】CrossDex:跨具身抓取,用一个策略控制任意的灵巧手
机械臂码垛实验[金工实习]
奔跑有点难度,步态很抽象,大佬们有没有什么好建议
B2机器狗负重夜爬太子尖
【Actuate 2024】中文字幕|机器人基础模型 - Robotic Foundation Models|Sergey Levine
最新 Boston Dynamics Atlas 人形机器人 合集
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
智能车的最后一舞!!!它必定是绝响!!!
机械手爬行
使用ROS2-Control + RL来控制四足机器人
20届智能车双车赛题浅浅完个赛吧!
盘点那些有趣的桌面机械臂13
机械臂加上AI打王者再也不会封号了,需要的微
MoveIt与Isaac Sim结合使用
具身智能机械臂实操入门课程-02:相机选型、接线与代码调试