V
主页
ICRA'2024 | 最新开源!RaTrack4D:使用4D雷达点云进行移动物体检测和跟踪
发布人
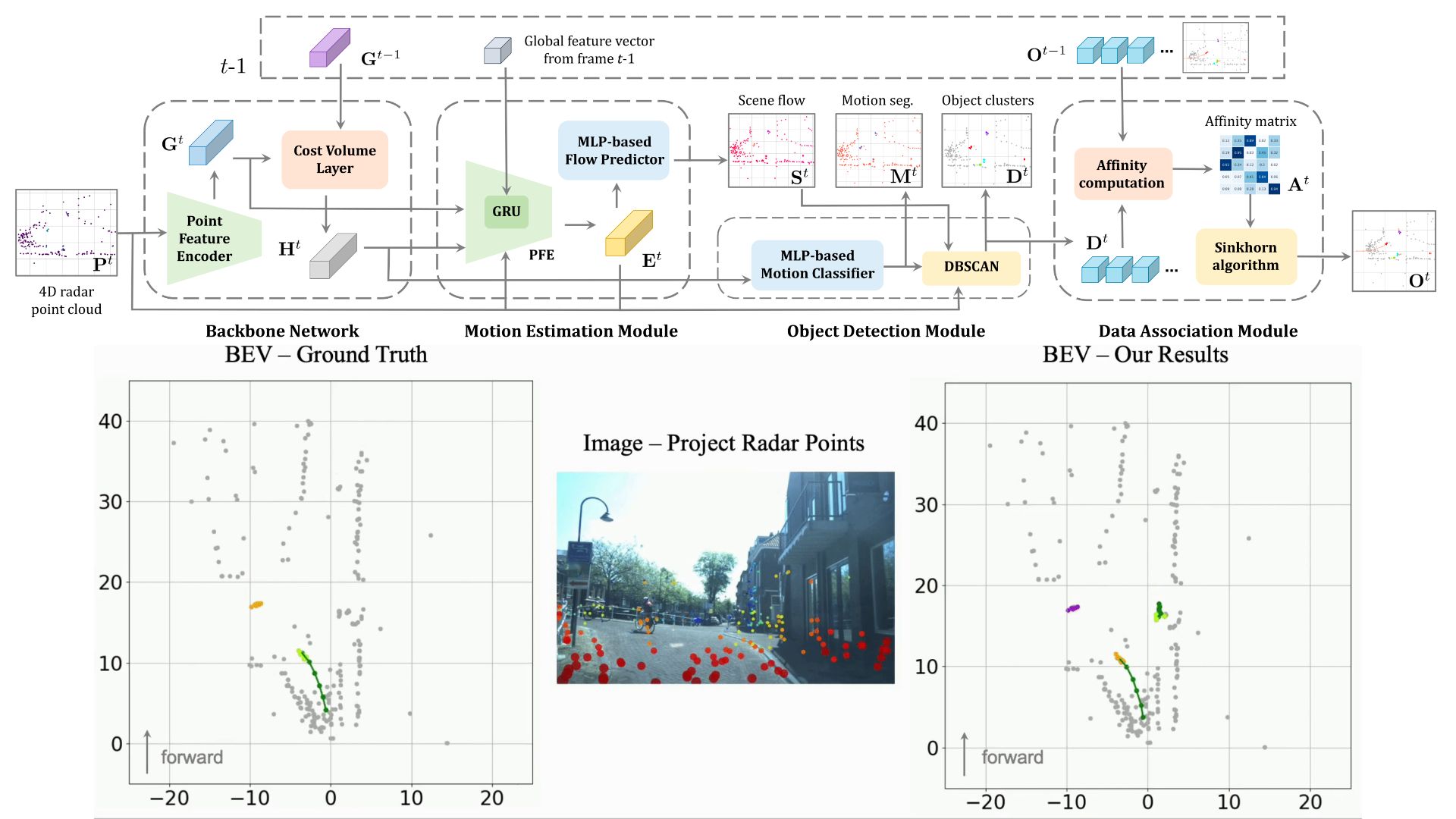
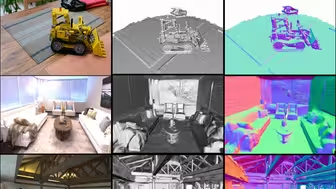
#.....vx添加“SLYYDS24”,获取最新面试题。添加时请备注【B站】优先通过....# 认识到雷达噪声和4D雷达数据中的点稀疏性所带来的挑战,来自爱丁堡大学的研究团队推出了RaTrack,一种专为基于雷达的跟踪量身定制的创新解决方案。RaTrack为移动物体的跟踪提供了全新的视角,强调运动分割和聚类的实用性,而不是传统上对特定物体类型和边界框的依赖。 标题:RaTrack: Moving Object Detection and Tracking with 4D Radar Point Cloud 链接:https://arxiv.org/html/2309.09737v7
打开封面
下载高清视频
观看高清视频
视频下载器
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
ECCV'24开源 | LocoTrack: 塑造SLAM新纪元!6倍加速! 跟踪一切最新SOTA!
CVPR'24 Highlight 开源,DyNFL:使用NeRF对动态激光雷达场景仿真
浙大、上海人工智能实验室等即将开源PGSR: 平面3DGS提升表面几何,超越 2DGS、GOF,实现渲染新高度
多伦多大学等发布!面向LiDAR点云的无监督目标检测
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合
全球首个开源自动驾驶场景3DGS工作—S Gaussian:用于自动驾驶的自监督街道高斯,无需标注,就可实现逼真的街景重建
ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
MAVIS:使用基于SE2(3)的精确IMU预积分的多摄像头增强视觉惯性SLAM,该研究成果已被icra2024接受。
来自中科院关于3DGS进展的最新综述,该团队的本次调查旨在帮助初学者快速进入该领域,并为经验丰富的研究人员提供全面的概述
清华&地平线最新开源!全任务SOTA!SparseDrive:端到端自动驾驶新范式!
【自动驾驶技术】花18000大价钱买的无人驾驶课程,从入门到提升的自动驾驶算法——感知实战、视觉定位、预测系统、路径规划、控制理论、强化学习
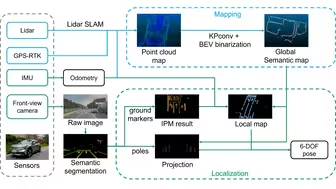
ICRA 2024 | 探索基于语义地图 的自动驾驶汽车单目定位技术
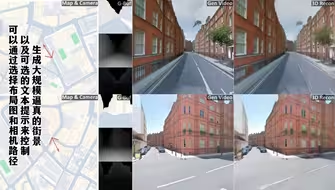
SIGGRAPH 2024 | Streetscapes:谷歌&斯坦福高调喊话:为智驾公司节省高开支,轻松实现“大规模街景生成
ECCV'2024 北航、极氪领衔 | FSD-BEV:大幅度提升基于视觉的3D目标检测算法性能,实现感知新SOTA!
UCSD、MIT华人团队开源Open-TeleVision:沉浸式体验跨越3000里的机器人远程操作。
【YOLOv10】12分钟通关YOLOv10,环境搭建、模型训练、验证推理、导出、数据集
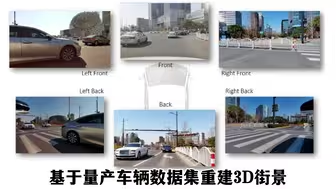
T-ITS | 秦通团队 Crowd-Sourced NeRF: 基于量产车辆数据集重建3D街景
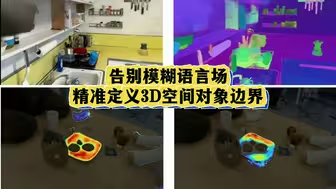
CVPR 2024 Highlight【清华、哈佛】|LangSplat:3D语言高斯溅射,告别模糊语言场,精准定义3D空间对象边界
自动驾驶主流感知范式:BEV
CenterNet+ deepsort多目标跟踪!提高检测精度和速度!
华为诺亚发布!MagicDrive3D适用于街景中的任意视图渲染的可控制的3D生成技术
RSS'2024 | MPCC++:升级无人驾驶安全盾牌,首次在现实中达到100%防撞率
CVPR'24 | NeRF新突破,启发式引导分割解决瞬态干扰
关于3D Gaussian Splatting SLAM的又一最新开源力作推出,LIV GaussMap:用于实时3D辐射场地图渲染的激光雷达、惯性、视觉融
1小时我居然就搞懂了多目标跟踪MOT算法!简直是小白救星!deepsort、yolo算法、目标检测、目标跟踪
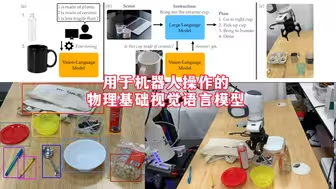
3.96万条众包和41.7万条自动化 的物理概念标注,助力VLMs突破 让机器人像人类一样理解物理世界
与CityDreamer相比速度提高60倍!GaussianCity:重建你的无人机视图与自动驾驶场景【可在主页预约四场与”3DGS ”相关的公开直播课
3DGS技术在水下:实现散射介质中的高质量场景快速重建!
算法岗的招聘现状与未来——移动机器人与自动驾驶专场
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
有救了!图像分割看这里!
【YOLOv5教程】花9888买的YOLOv5全套教程2024完整版现分享给大家!免费白嫖!值得收藏!——附赠课程与资料!——(人工智能、深度学习、机器学习)
ECCV 2024 代码开源 | HTCL:分层时间上下文,超过LiDAR,问鼎OCC,霸榜所有视觉方案
基于深度学习的物体检测
YOLO版本再升级 !YOLOv10:优化架构与无NMS训练提升实时目标检测效率
闭环 SOTA | 首个基于MLLM的自动驾驶规划系统,性能高,Token少!
强推!2024年站最系统的无人驾驶技术全套教程,一口气带你学完感知实战、视觉定位、路径规划、预测系统,从入门到进阶!!!(自动驾驶/无人驾驶/人工智能/AI)
科研能力是指什么能力?
【科研废物导航】这里的科研工具比4399里的游戏还多!我愿称之为年度最伟大的发现——SCI论文/文献/谷歌学术/期刊查询