V
主页
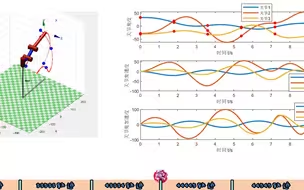
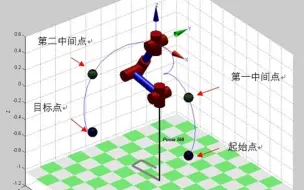
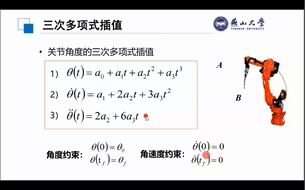
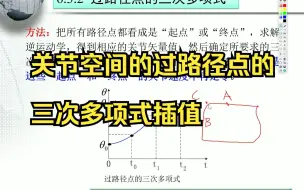
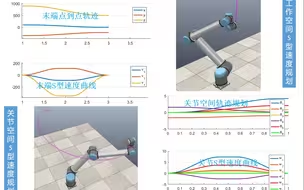
五次&三次多项式连续轨迹规划
发布人
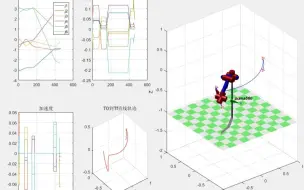
1.三次多项式和五次多项式生成机器人连续轨迹曲线; 2.从点到点到连续点到点的轨迹规划,实现任意个数点的轨迹规划; 3.算法底层实现全部为公式翻译实现,非调用matlab 插值函数,可直接翻译成 C 代码进行嵌入式控制; 4.可自由设置或自动生成机器人起点和终点速度,加速度大小。
打开封面
下载高清视频
观看高清视频
视频下载器
【轨迹规划】多项式轨迹规划(三次点到点,五次连续过中间点)
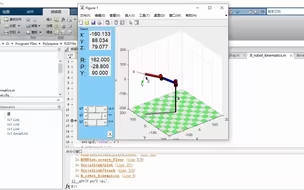
一起用Matlab从零手写六轴机械臂正逆解和轨迹规划
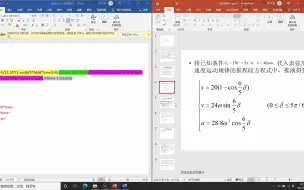
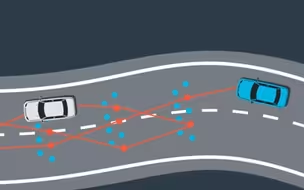
基于五次多项式的横向跟踪轨迹模型
基于3-5-3分段插值的粒子群时间最优的轨迹规划算法
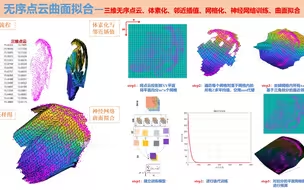
无序点云曲面拟合—三维无序点云、体素化、邻近插值、网格化、神经网络训练、曲面拟合
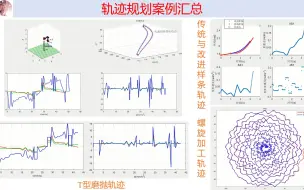
轨迹规划案例汇总
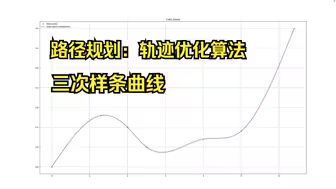
路径规划曲线平滑,轨迹优化算法:三次样条曲线代码实现
6自由度机机械臂五次多项式轨迹规划
轨迹规划与跟踪控制
4-23轨迹规划
五次非均匀B样条S型轨迹规划
6-6关节空间的高阶多项式插值
机器人多项式拼接轨迹规划的各类形式建模仿真——33333、33533、43334、44445、44545拼接轨迹
NUBUS五次非均匀B样条轨迹规划及机械臂仿真
机器人路径规划、轨迹优化课程-第十讲-多项式轨迹与Minimun Snap原理讲解
机器人轨迹生成--七次多项式轨迹规划
6-13轨迹规划的Matlab仿真
机器人学 l 7.2 轨迹规划中的三次多项式插值
新手入门三次多项式插值
机器人轨迹规划 353轨迹规划三次多项式轨迹规划五次多项式轨迹规划六自由度
六自由度机械臂五次_七次多项式样条插值曲线_五次B样条曲线插值【三套代码】
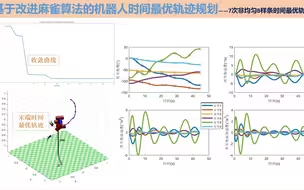
基于改进麻雀算法的机器人时间最优轨迹规划——7次非均匀B样条轨迹
好玩的轨迹规划控制
基于粒子群的六自由度机械臂能量最优轨迹规划
6-5关节空间的过路径点的三次多项式插值
轨迹规划和生成|三次多项式|抛物线混合
MATLAB五种插值合集源码分享(线性、三次、三次样条、最邻近、分段三次Hermite),解决多变量样本空值插值,以及零值插值
常见的运动基元 C++实现(五次多项式、bezier、B–spline、螺旋曲线)
matlab 机器人 运动学 正逆运动学 轨迹规划 出图
学术论文上B站:点进来你就能学到一种轨迹规划算法
机器人学 l 7.1 机器人轨迹规划的相关概念
凸轮函数算法
自动驾驶决策规划算法第一章第一节 细说五次多项式
MATLAB机械臂运动仿真+轨迹规划
【史上最强机械臂教程】机械臂运动学、轨迹规划和动力学控制仿真
改进RRT路径规划与轨迹规划
UR机器人S型轨迹规划matlab、vrep联合仿真
样条曲线轨迹规划
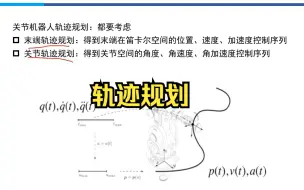
轨迹规划
基于MPC模型预测控制的五次多项式轨迹跟踪