V
主页
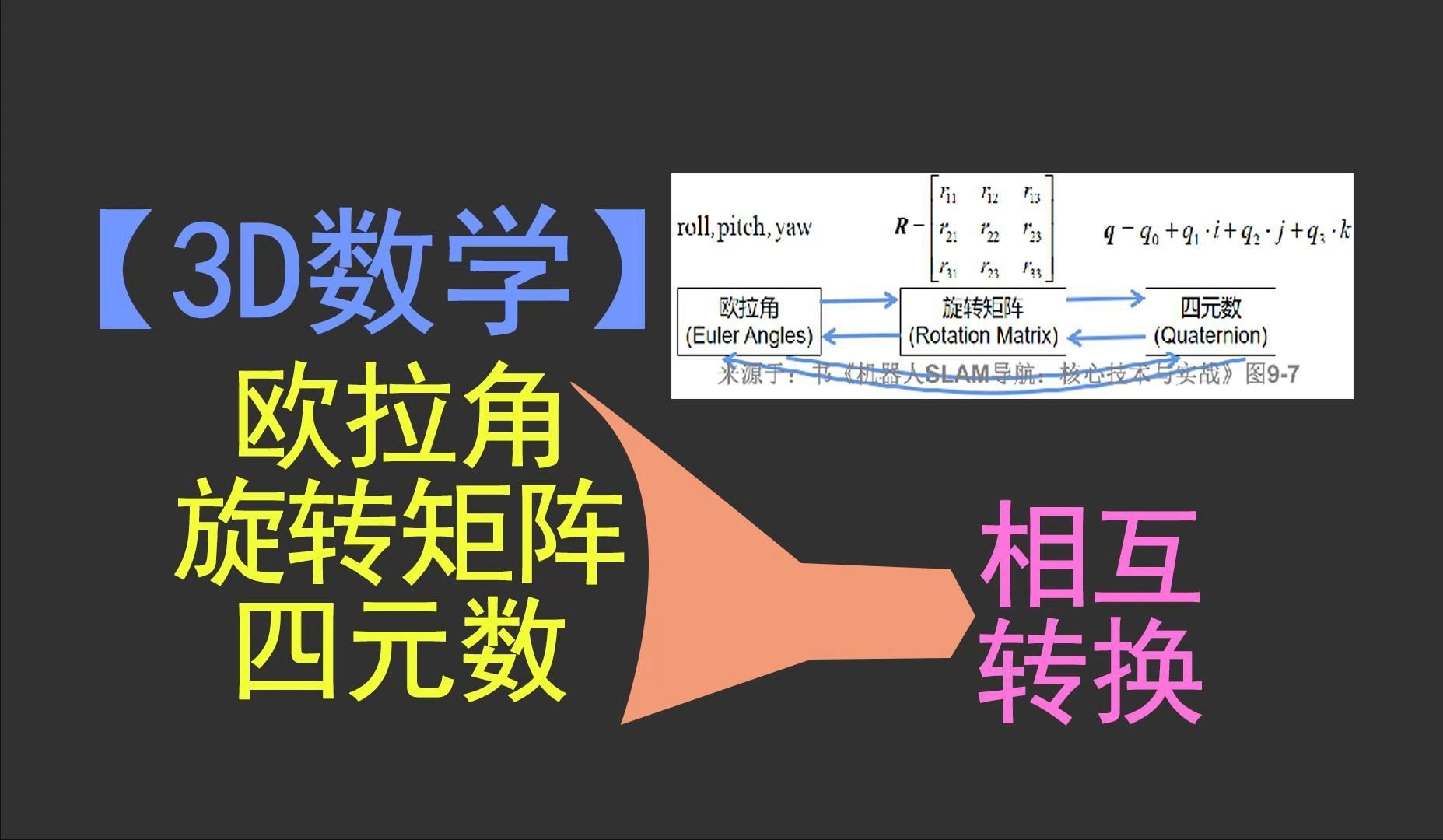
【3D数学】欧拉角旋转矩阵四元数相互转换
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【3D数学】认识欧拉角
IMU参数标定终于有人讲清楚了
多传感器融合的本质
谷歌cartographer构建大规模地图(激光雷达+IMU+轮式里程计融合建图)
双目相机如何标定
机器人底盘两轮差速模型详解
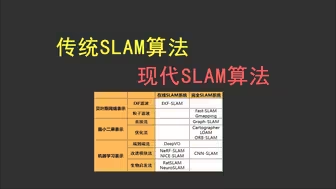
SLAM算法有哪些
视觉SLAM的本质多视图几何
SLAM中的位姿估计量为什么用转移矩阵T表示
【一看就懂】SLAM算法原理通俗解读
SLAM算法的核心概率理论
IMU的数据如何采集
【3分钟】快速了解SLAM算法的本质
【浅显易懂】卡尔曼滤波原理解读
搞SLAM开发不比在非洲拉香蕉简单
先学激光SLAM还是先学视觉SLAM
机器人底盘四轮差速模型详解
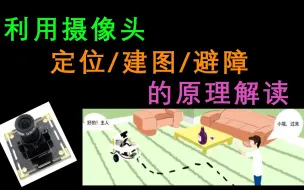
【机器人关键技术】利用摄像头定位、建图、避障的原理解读
【全网最详细】RGB-D相机原理分析
视觉SLAM算法入门必备基础知识
激光SLAM算法有哪些
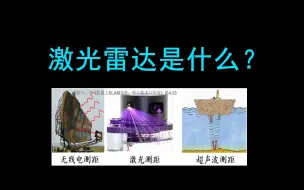
激光雷达是什么
【直播回放】机器人SLAM导航书内容导读与学习方法:SLAM中多视图几何问题详解
粒子滤波的本质
激光雷达畸变校准
【SLAM算法学习】螺旋上升式学习过程
机器人中的IMU有什么用
为什么需要多传感器融合
最大似然、最小二乘和贝叶斯估计的区别
SLAM算法的本质数据关联
视觉惯导融合SLAM内外参标定是关键
RTABMAP算法激光视觉融合SLAM
机器人SLAM导航为什么需要轨迹跟踪
B站最通俗易懂的【机器学习-数学基础】草履虫都能看懂!全套200+集,史诗级巨作,不漏掉任何一个知识点!
为什么SLAM是状态估计问题
机器人底盘两轮差速模型演变过程
单目相机如何标定
SLAM算法学习方法
SFM、BA和SLAM比较
图像滤波的原理终于有人给讲明白了