V
主页
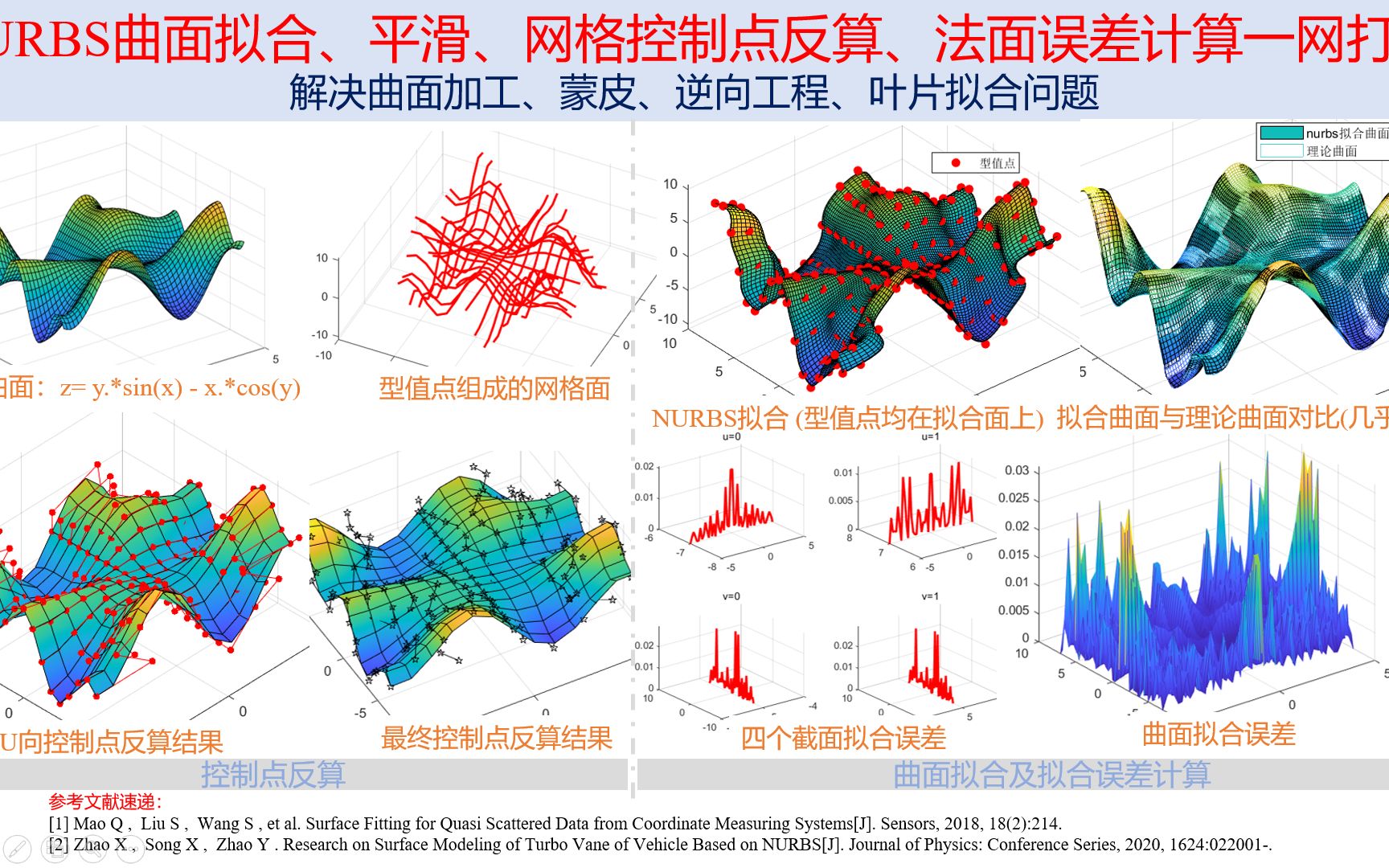
NURBS曲面拟合、平滑、网格控制点反算、法面误差计算一网打尽
发布人
曲面拟合天花板项目,NURBS曲面拟合、平滑、网格控制点反算、法面误差计算一网打尽,解决曲面加工、蒙皮、逆向工程、叶片拟合问题。 BGM:云村的烟花
打开封面
下载高清视频
观看高清视频
视频下载器
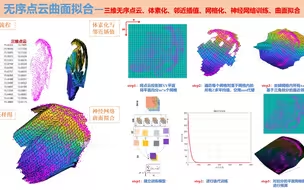
无序点云曲面拟合—三维无序点云、体素化、邻近插值、网格化、神经网络训练、曲面拟合
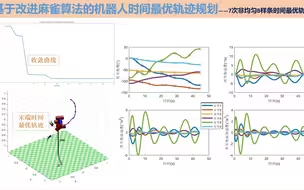
基于改进麻雀算法的机器人时间最优轨迹规划——7次非均匀B样条轨迹
五次非均匀B样条S型轨迹规划
样条曲线轨迹规划
改进RRT路径规划与轨迹规划
维新派和传统派都沉默了
NUBUS五次非均匀B样条轨迹规划及机械臂仿真
机器人连续位姿同步插值轨迹规划——对数四元数、b样条曲线、c2连续位姿同步规划
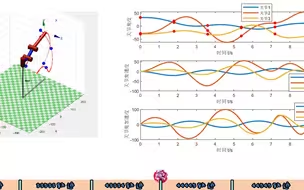
NURBS曲线型值点反求控制点、导数求解、轨迹曲线拟合
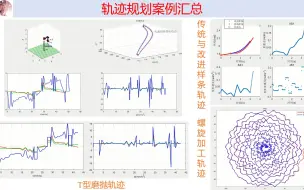
轨迹规划案例汇总
基于伪谱法的航天器姿态路径优化
就你叫蒙皮传递粘连是吧!(把你解决了.)
机器人焊接轨迹仿真
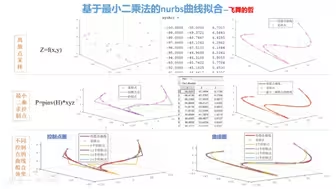
基于最小二乘的nurbs曲线拟合
机械臂姿态平滑规划
越来越多面数的布料落在羊上
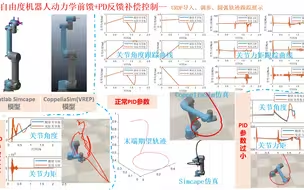
六自由度机械臂动力学轨迹跟踪控制
网络验证卡密软件逆向分析方法教学:代码暴力破解法,付费软件如何逆向破解的?【游戏安全,软件安全,网络安全】小白软件破解反汇编逆向安全工程师2024最新
上车!深入学习Maya 游戏蒙皮Rig绑定高效班(全网最准机翻)_无加密
x64dbg脚本编程逆向工程 - x64dbg Script Programming For Reverse Engineering
机器人多项式拼接轨迹规划的各类形式建模仿真——33333、33533、43334、44445、44545拼接轨迹
六自由度机械臂+模型预测控制MPC+倒立摆+二自由度机械臂
【无逆向难爬虫】爬虫高手进阶之路,JS逆向技术深度剖析与实战教程,还学不会咱们就转行吧!!
六自由度机械臂重力补偿控制
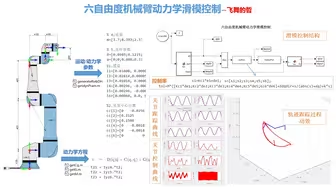
六自由度机械臂动力学滑模控制
分解控制
0基础入门学习游戏安全技术:外挂、辅助、脚本,传奇游戏逆向13:背包物品数据遍历(推算法)
【一下省3W】爬虫JS逆向一套200集臻享版系统教程!保姆级Python爬虫进阶课,会逆向才是真爬虫!从入门/进阶/实战/精通/做单!再学不会就赶紧退圈吧!
机器人零空间、全身控制、任务级优先、末端定位姿控制方法,从曲柄滑块、六自由度、七自由度机器人到车载机械臂的打怪升级之路
机械臂碰撞检测双臂检测单臂与障碍物检测
冒死上传⚠️全站唯一JS逆向技术教程,3天学完网络爬虫进阶知识,企业级逆向实战(逆向算法,混淆参数、验证码、滑块、APP逆向,爬虫逆向
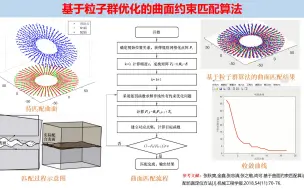
基于粒子群优化的曲面约束匹配算法
【逆向】iReal M3三维扫描仪轻松获取电钻的3D数据
Gemagic designX逆向建模-DX-机械类-6方法一
【200集,无逆向不爬虫】爬虫JS逆向2025新手看完都能入门到精通的系统教程,3天直接学会上岸接单!就业也是轻松搞定!
机器人阻抗控制— 动力学建模、试探抓取目标物、控制周期影响展示
人形机器人控制仿真
【全400集】比付费还强10倍的Python爬虫进阶js逆向全套教程,2024最新版,全程通俗易懂,别再走弯路了!
【游戏逆向】0基础学习传奇游戏逆向系列章节:遍历地图装备物品信息,代码编写,数据分析
【无逆向不爬虫】2024新版爬虫逆向100课,一周学会拿下25K!(Python爬虫进阶实战教程、web/js/算法/app逆向、滑块/点选/图片验证码)