V
主页
轨迹规划案例汇总
发布人
展示了一些轨迹规划的相关案例,涉及加工及一般的连续轨迹规划领域,部分内容包含了改进前后方法的对比。欢迎交流、讨论。 BGM:穿越时空的思念 (DiESi Remix)、Last Reunion。
打开封面
下载高清视频
观看高清视频
视频下载器
轨迹规划
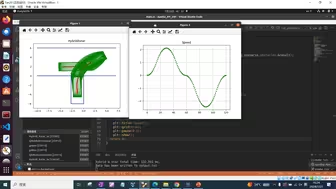
【Python】轨迹规划——时间最优
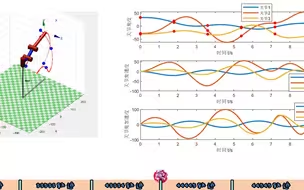
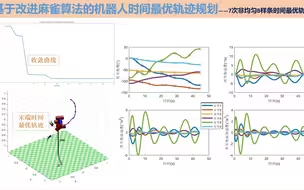
基于改进麻雀算法的机器人时间最优轨迹规划——7次非均匀B样条轨迹
机器人多项式拼接轨迹规划的各类形式建模仿真——33333、33533、43334、44445、44545拼接轨迹
五次&三次多项式连续轨迹规划
Delta并联机器人门型轨迹规划
人形机器人控制仿真
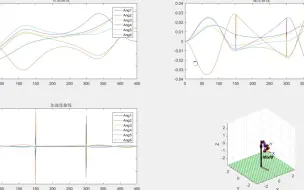
NUBUS五次非均匀B样条轨迹规划及机械臂仿真
机器人连续位姿同步插值轨迹规划——对数四元数、b样条曲线、c2连续位姿同步规划
基于六自由度机械臂避障的RRT轨迹+梯形速度规划算法
机械臂轨迹规划matlab、Vrep联合仿真
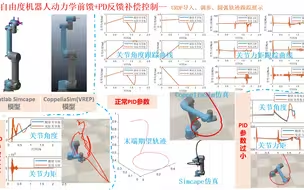
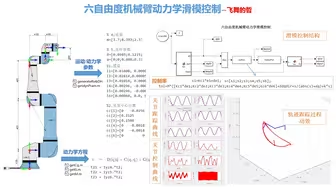
六自由度机械臂动力学轨迹跟踪控制
NURBS曲线型值点反求控制点、导数求解、轨迹曲线拟合
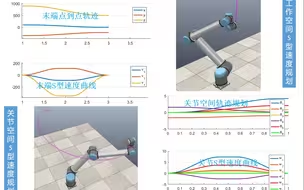
五次非均匀B样条S型轨迹规划
基于粒子群的六自由度机械臂能量最优轨迹规划
样条曲线轨迹规划
UR机器人S型轨迹规划matlab、vrep联合仿真
六自由度机器人改进粒子群PSO轨迹规划
这可能是B站最新的MATLAB教程了!花3小时就能从入门到精通,能听懂人话就行,包教包会!
粒子群轨迹规划
改进RRT路径规划与轨迹规划
机器人焊接轨迹仿真
基于粒子群/遗传算法的取件机械手轨迹综合优化设计
小段曲线速度、姿态连续轨迹规划及运动仿真
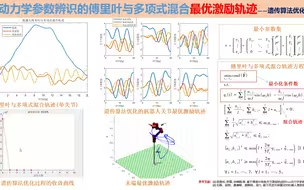
动力学参数辨识的傅里叶与多项式混合最优激励轨迹
六自由度机械臂动力学滑模控制
多差速驱动全方位轮式移动机器人仿真
分解控制
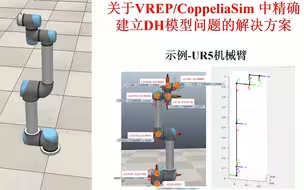
关于VREP/CoppeliaSim 中精确建立DH模型问题的解决方案 - ur5机器人视频教程
无人机与小车的协同轨迹跟踪控制
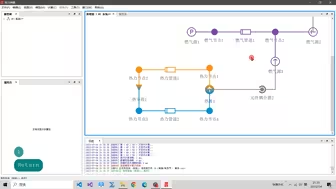
电力神器软件技术交流(持续更新)
基于倒立摆模型的双足机器人爬楼梯运动控制
六自由度动力学RBF自适应阻抗恒力控制
人工势场动态避障,二维APF
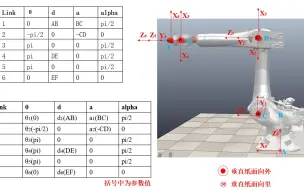
六自由度工业机器人DH建模与逆运动学仿真
混合A星速度规划尝试
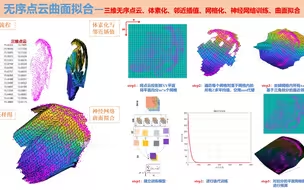
无序点云曲面拟合—三维无序点云、体素化、邻近插值、网格化、神经网络训练、曲面拟合
六自由度机械臂逆解仿真
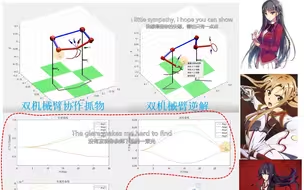
双臂机器人仿真
机械臂姿态平滑规划