V
主页
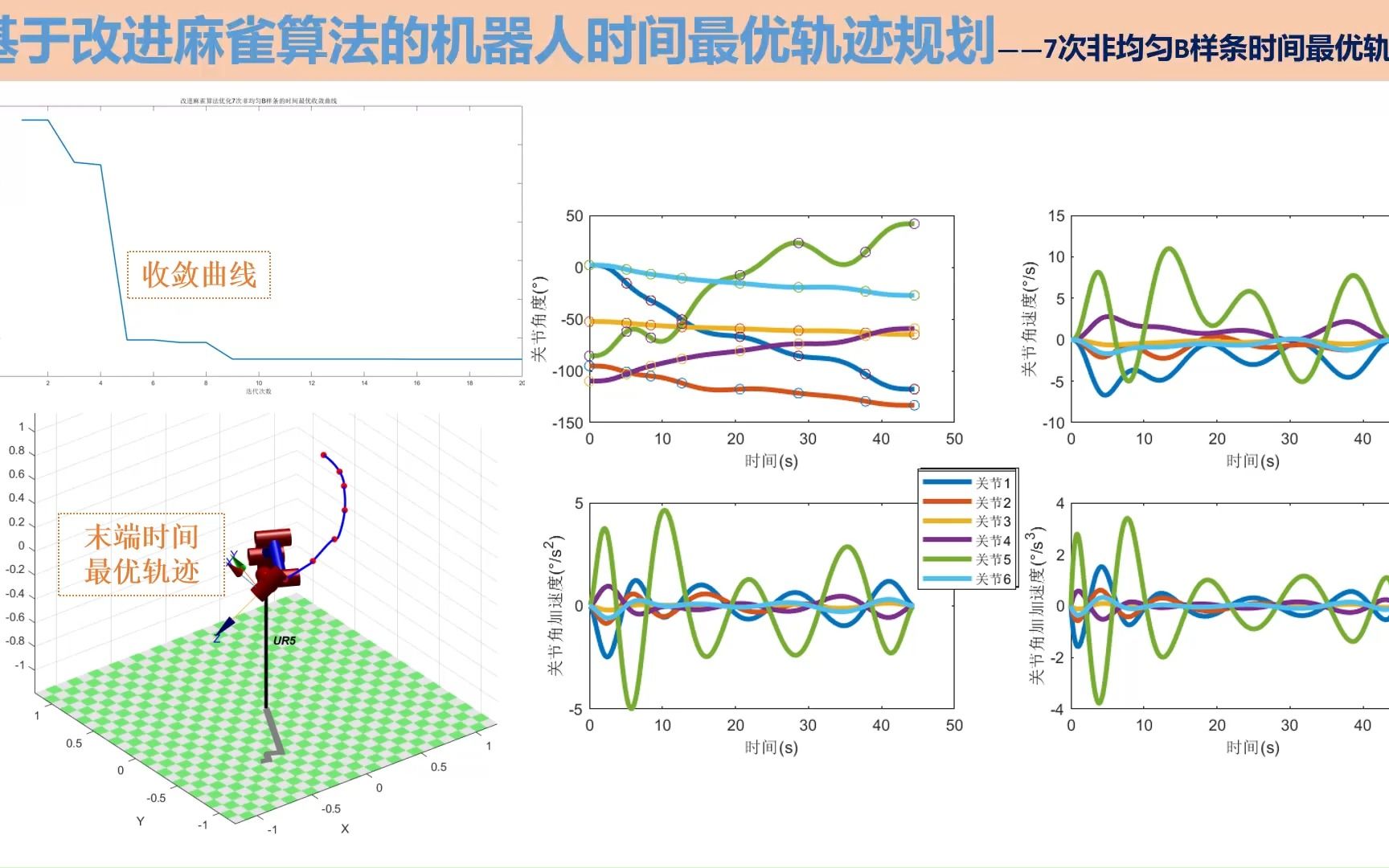
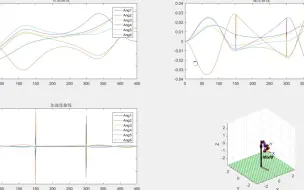
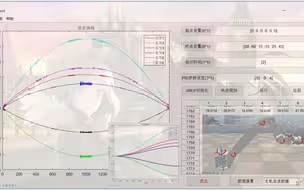
基于改进麻雀算法的机器人时间最优轨迹规划——7次非均匀B样条轨迹
发布人
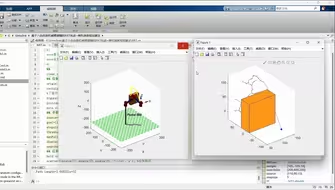
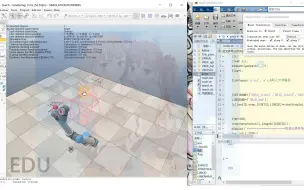
基于改进麻雀算法的机器人时间最优轨迹规划,主要完成的工作如下: 1.完成基于7次非均匀B样条的轨迹规划,包括控制点反算,路径点约束; 2.采用改进麻雀算法对7次非均匀B样条轨迹的时间进行优化,获得满足速度、加速度、加加速度最优的时间最优轨迹; 3.将优化得到的轨迹取出,绘制仿真动画。 BGM:すずめ feat.十明
打开封面
下载高清视频
观看高清视频
视频下载器
机器人多项式拼接轨迹规划的各类形式建模仿真——33333、33533、43334、44445、44545拼接轨迹
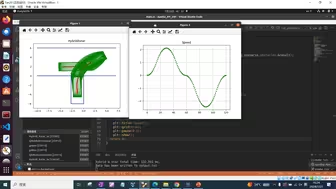
【Python】轨迹规划——时间最优
五次&三次多项式连续轨迹规划
无人机轨迹规划经典算法ros/c++开源实现
NURBS曲面拟合、平滑、网格控制点反算、法面误差计算一网打尽
Delta并联机器人门型轨迹规划
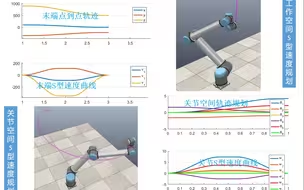
五次非均匀B样条S型轨迹规划
人形机器人控制仿真
轨迹规划案例汇总
机械臂轨迹规划matlab、Vrep联合仿真
NUBUS五次非均匀B样条轨迹规划及机械臂仿真
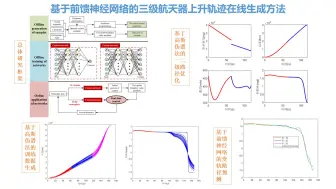
基于前馈神经网络的三级航天器上升轨迹在线生成
小段曲线速度、姿态连续轨迹规划及运动仿真
机器人速度前瞻控制算法
基于粒子群的六自由度机械臂能量最优轨迹规划
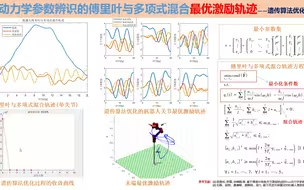
动力学参数辨识的傅里叶与多项式混合最优激励轨迹
基于六自由度机械臂避障的RRT轨迹+梯形速度规划算法
机器人连续位姿同步插值轨迹规划——对数四元数、b样条曲线、c2连续位姿同步规划
粒子群轨迹规划
机器战争
四足机器人步态仿真
NURBS曲线型值点反求控制点、导数求解、轨迹曲线拟合
机器人示教仿真
机器人焊接轨迹仿真
轨迹规划
六自由度机器人改进粒子群PSO轨迹规划
样条曲线轨迹规划
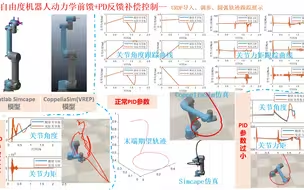
六自由度机械臂动力学轨迹跟踪控制
UR机器人S型轨迹规划matlab、vrep联合仿真
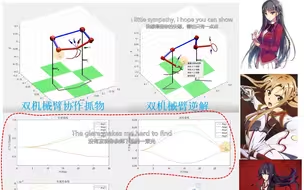
双臂机器人仿真
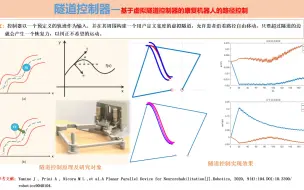
隧道控制器基于虚拟隧道控制器的康复机器人的路径控制
无人机与小车的协同轨迹跟踪控制
主从机械臂||双机械臂跟随控制
机械臂阻抗力跟踪、阻抗MBK参数对力跟踪效果影响
你可以不赞,甚至可以不看,但一定要记得收藏!
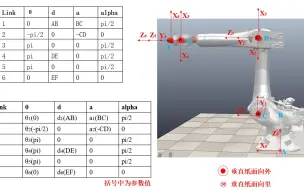
六自由度工业机器人DH建模与逆运动学仿真
混合A星速度规划尝试
男孩被冰冻2000年,醒来时人类已经灭绝,机器人主宰世界!
六自由度机械臂雅可比矩阵的实验验证
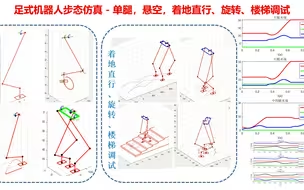
足式机器人步态仿真、单腿、悬空、着地直行、旋转、爬楼梯联合调试