V
主页
机器人连续位姿同步插值轨迹规划——对数四元数、b样条曲线、c2连续位姿同步规划
发布人
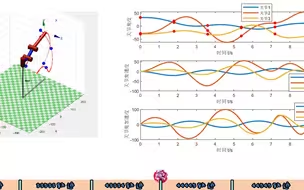
机器人连续位姿同步插值轨迹规划—对数四元数、b样条曲线、c2连续位姿同步规划 参考文献:Shi Y , Pu Y , Lin X ,et al.C 2 -Continuous Orientation Planning for Robot End-Effector with B-Spline Curve Based on Logarithmic Quaternion[J].Mathematical Problems in Engineering, 2020, 2020.DOI:10.1155/2020/2543824. 简介:Smooth orientation planning is benefificial for the working performance and service life of industrial robots, keeping robots from violent impacts and shocks caused by discontinuous orientation planning. Nevertheless, the popular used quaternion inter polations can hardly guarantee C2 continuity for multiorientation interpolation. Aiming at the problem, an effiffifficient quaternion interpolation methodology based on logarithmic quaternion was proposed. Quaternions of more than two key orientations were expressed in the exponential forms of quaternion. &ese four-dimensional quaternions in space S3 , when logarithms were taken for them, could be converted to three-dimensional points in space R3 so that B-spline interpolation could be applied freely to interpolate. &e core formulas that B-spline interpolated points were mapped to quaternion were founded since B-spline in terpolated point vectors were decomposed to the product of unitized forms and exponents were taken for them. &eproposed methodology made B-spline curve applicable to quaternion interpolation through dimension reduction and the high-order continuity of the B-spline curve remained when B-spline interpolated points were mapped to quaternions. &e function for reversely fifinding control points of B-spline curve with zero curvature at endpoints was derived, which helped interpolation curve become smoother and sleeker. &e validity and rationality of the principle were verifified by the study case. For comparison, the study case was also analyzed by the popular quaternion interpolations, Spherical Linear Interpolation (SLERP) and Spherical and Quadrangle (SQUAD).
打开封面
下载高清视频
观看高清视频
视频下载器
机器人多项式拼接轨迹规划的各类形式建模仿真——33333、33533、43334、44445、44545拼接轨迹
样条曲线轨迹规划
五次&三次多项式连续轨迹规划
NURBS曲线型值点反求控制点、导数求解、轨迹曲线拟合
机器人焊接轨迹仿真
无序点云曲面拟合—三维无序点云、体素化、邻近插值、网格化、神经网络训练、曲面拟合
NUBUS五次非均匀B样条轨迹规划及机械臂仿真
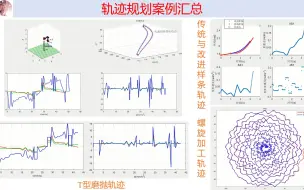
轨迹规划案例汇总
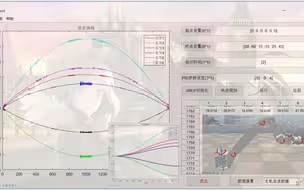
小段曲线速度、姿态连续轨迹规划及运动仿真
NURBS曲面拟合、平滑、网格控制点反算、法面误差计算一网打尽
轨迹规划
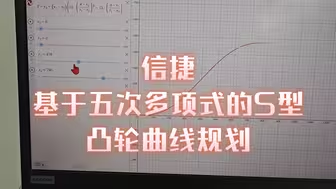
[信捷]基于五次多项式的S型凸轮曲线规划,不需要配凸轮表
机械臂轨迹规划matlab、Vrep联合仿真
六自由度机器人改进粒子群PSO轨迹规划
多差速驱动全方位轮式移动机器人仿真
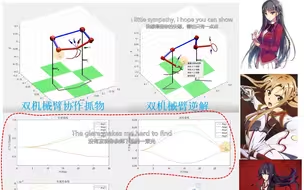
主从机械臂||双机械臂跟随控制
无人机与小车的协同轨迹跟踪控制
人形机器人控制仿真
改进RRT路径规划与轨迹规划
基于贝塞尔曲线的六足机器人步态规划
六自由度机械臂+模型预测控制MPC+倒立摆+二自由度机械臂
基于粒子群的六自由度机械臂能量最优轨迹规划
五次非均匀B样条S型轨迹规划
四足机器人步态仿真
机器人示教仿真
六自由度工业机器人DH建模与逆运动学仿真
粒子群轨迹规划
车载六自由度机械臂仿真
基于倒立摆模型的双足机器人爬楼梯运动控制
双臂机器人仿真
你的曲线坑坑洼洼锯齿状?打开origin用插值平滑曲线!
机械臂阻抗力跟踪、阻抗MBK参数对力跟踪效果影响
机器人阻抗控制— 动力学建模、试探抓取目标物、控制周期影响展示
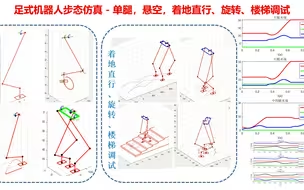
足式机器人步态仿真、单腿、悬空、着地直行、旋转、爬楼梯联合调试
示教展示机器人碰撞检测过程 — 最直观的方式看懂碰撞检测
六自由度机械臂重力补偿控制
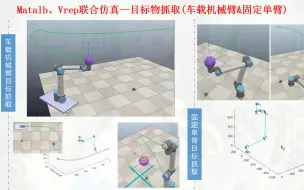
六自由度机械臂目标物抓取-车载&单臂matalb、vrep联合仿真
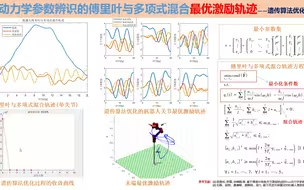
动力学参数辨识的傅里叶与多项式混合最优激励轨迹
基于零空间的任务级优先控制wbc、ROS、matlab
4驱4转全向移动机器人运动控制