V
主页
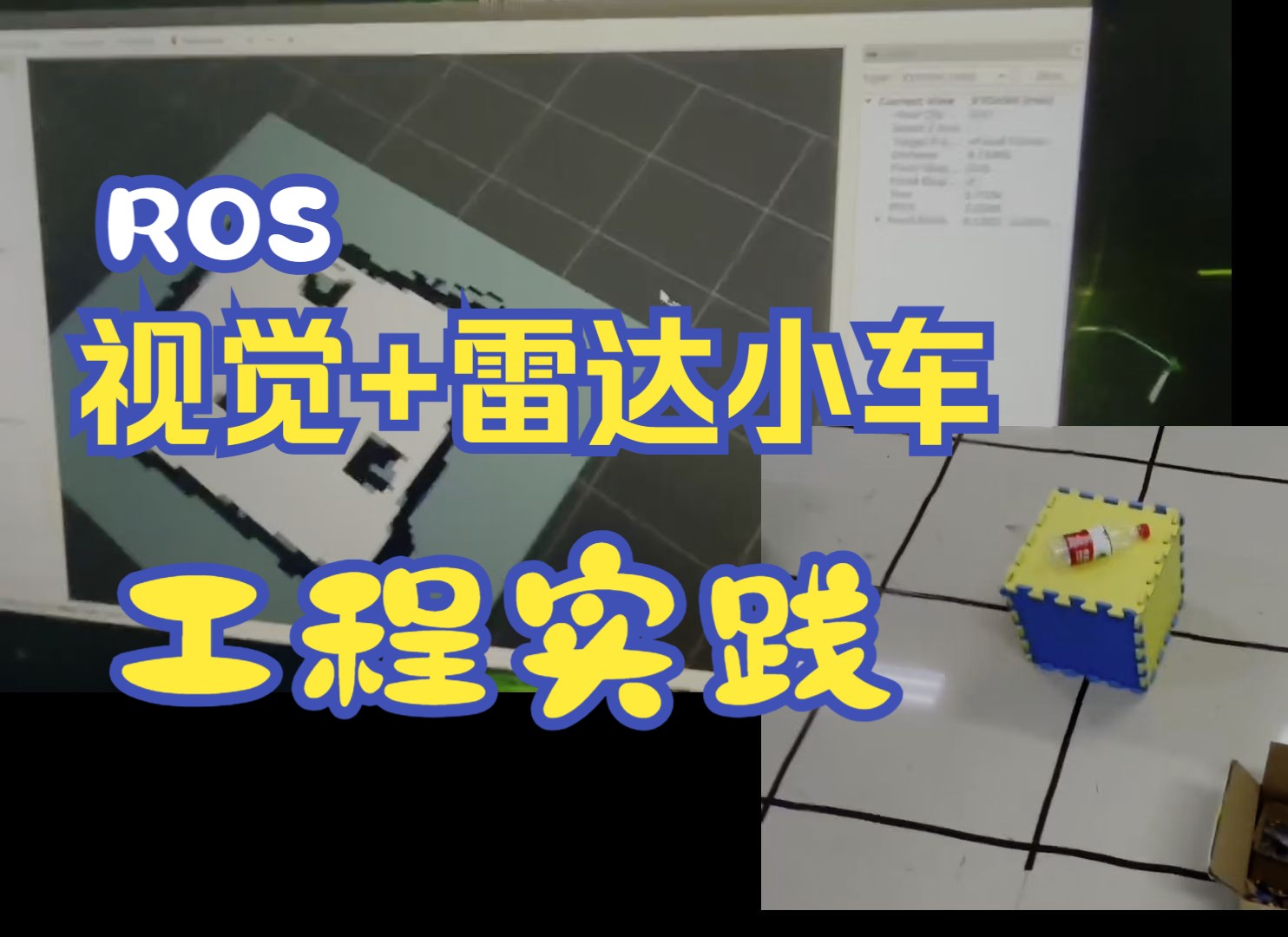
【ROS】【三维重建】【工程实践】 雷达+深度相机实现深度优先搜索
发布人
浙江工业大学工程实训 。硬件为亚博ROSMASTER X1差速小车,板载电脑为Jetson Nano 4G ,深度相机为奥比中光Astra Pro,2D雷达为A1,下位机是 STM32,采用4轮差速。综合实现了三维重建,巡线,人脸识别并跟随,深度优先搜索,A*算法。源代码已上传github,地址: cyz2022/ZJUT_ROSMASTER_X1: 浙江工业大学工程实训小车 雷达+视觉实现深度优先搜索以及A星搜索 (github.com)
打开封面
下载高清视频
观看高清视频
视频下载器
【今日睇真D】无人驾驶也能吵架?安全员火力全开?
感觉不到我的身体~
ROS-Gazebo-Rviz-轨迹规划与跟踪算法合集__01_LQR&A_Star
ECCV 2024 深度估计和3D重建新系统!DoubleTake杀疯了!
梅西为什么总是在“口袋”里接球
基于B样条和改进A*的避障
3D Gaussian splatting 改进后室内重建效果
333分钟,一口气看完,深度解读现代物理学几乎所有理论!
申抒含:复杂场景三维重建与理解 | 2024人工智能暑期学校
巴黎奥运会一大亮点
日本IT没有996和35岁危机,但是。。。 #计算机 #it #程序员 #对日IT #编程
圆形水果扫描三维重建,拍照方法
ECCV 2024 超越3DGS!3D场景重建新方法!WildGaussians:不惧遮挡和外观变化!
3D高斯泼溅技术落地需要解决哪些问题?
(开源)最迷你的ROS2 机器人,自动路径规划、视觉识别、人体检测跟随、手势识别控制、多形态切换(想要资料评论区留言安排!)
【Fivever】【麦麦】Gee Chinajoy 新国际博览中心 20240727
无视干扰,谷歌开源SpotlessSplats:3D场景重建中的干扰物识别与排除
ROS 颜色目标识别与定位的 C++ 实现
ROS 颜色目标跟随的 C++ 实现
马斯克猫女机器人,女友传三代,人走她还在
【雅思口语】一个又狠又穷的口语练习方法(已迭代多次)
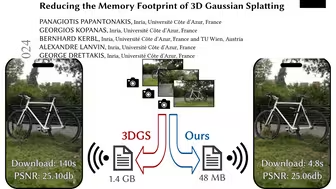
3DGS官方团队新作!减少3DGS内存占用,可达29.87倍压缩,渲染速度提高1.7倍!
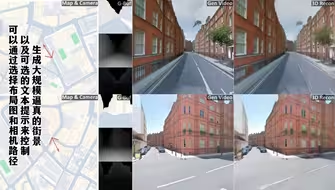
SIGGRAPH 2024 | Streetscapes:谷歌&斯坦福高调喊话:为智驾公司节省高开支,轻松实现“大规模街景生成
这是我看过最强的三维点云+三维重建实战教程! 计算机博士给我教明白了!
国内智驾老兵百度开源BEVWorld:通过统一BEV潜在空间实现自动驾驶的多模态世界模型
【三维AIGC】扩散模型LDM辅助3D Gaussian重建三维场景
[解析] 为什么AI创作的“史”,能得到如此高的流量?
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
机器人公司终于来了位00后运营,领导非常放心,大家觉得怎么样?
AI预告片《复仇者联盟5:毁灭博士》
ECCV 2024 三维重建新工作!MVSGaussian:太丝滑了!
[可泛化GS重建] 华中科技大学、南洋理工等提出MVSGaussian,一种从MVS快速的可泛化的GS重建方法,可以有效、通用地重建未见的场景,并达到实时渲染
专家:这无人机得逼着策划人加班想新赛题了
【整整600集】全B站最用心的数据分析零基础教程,带你7天搞定Python数据分析,理论+实战+思维提升包含所有干货!0基础小白看这套就够了,存下吧,很难找全的
爸爸用AI复活了妈妈
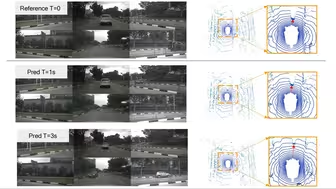
基于ROS的多车道道路环境下的车距保持与自主变道与超车
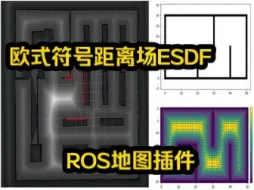
环境建模|欧式符号距离场ESDF的ROS地图插件实现
ECCV 2024 代码开源 | HTCL:分层时间上下文,超过LiDAR,问鼎OCC,霸榜所有视觉方案
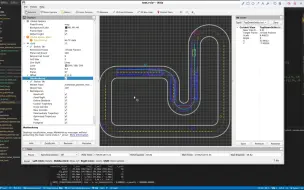
快速流畅!人工智能ROS小车雷达导航、路径规划、虚拟仿真、slam导航算法
ROS 人脸检测的 C++ 实现