V
主页
【三维AIGC】扩散模型LDM辅助3D Gaussian重建三维场景
发布人
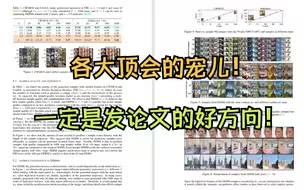
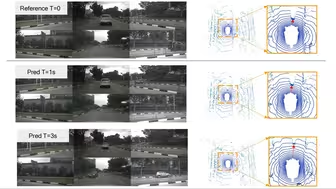
本文提出一个三维场景的潜在扩散模型,它仅使用2D图像数据训练。文章首先设计了一个 1.自动编码器,将多视图图像映射到三维GS ,同时构建这些splats的压缩潜在表示。然后,我们 2.在潜在空间上训练一个多视图扩散模型来学习一个有效的生成模型 。该管道不需要对象的mask 或深度,并且适用于具有任意摄像机位置的复杂场景。我们在两个复杂真实场景的大规模数据集上进行了仔细的实验-MVImgNet和RealEstate 10K。我们的方法能够在短短0.2秒内生成3D场景,或从头开始,从单个输入视图,或从稀疏输入视图。它产生多样化和高质量的结果,同时运行比非潜在扩散模型和早期的基于NeRF的生成模型快一个数量级
打开封面
下载高清视频
观看高清视频
视频下载器
【三维重建】动态场景和高质量表面的Gaussian Splatting
【三维重建】ExtraNeRF:基于扩散模型,对NeRF进行外延
【三维AIGC】GSD:从单张视图中重建3DGS的扩散模型
【动态场景重建】《deformable 3D Gaussian Splatting》与《4D Gaussian Splatting》原理讲解(CVPR2024)
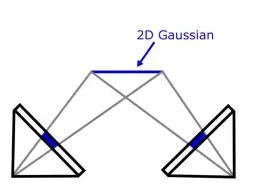
【三维重建】2DGS:2D Gaussian Splatting的几何辐射场
【三维重建】InstantSplat:稀疏视角重建三维场景(无需SFM位姿)
【三维重建】Sparse_NeRF:只需三张图就能重建三维场景(代码讲解)
【稀疏三维重建】pixelSplats:只需两张图的可扩展三维重建
VastGaussian:用于大场景重建的大3D Gaussian(CVPR 2024)论文解读
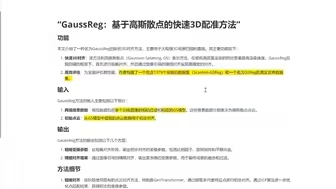
【三维GS配准】GaussReg:利用GS进行3D配准的创新性粗到精框架
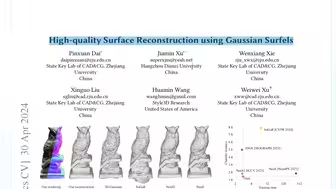
【三维重建】使用高斯表面元( Surfels) 高质量重建表面
研一研二必看!不愧是2024最好出论文的两个研究方向:Diffusion扩散模型+对比学习,源码复现+模型精讲+论文解读,迪哥带你轻松搞定论文创新点!
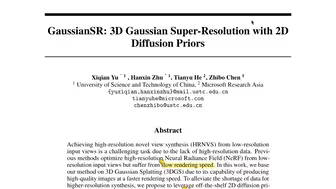
【三维重建】GaussianSR-2D扩散先验的三维高斯超分
【NeRF】【自监督学习】NeRF-MAE:NerfStudio组联合TOYOTA推出的三维自监督预训练大模型
3D Gaussian splatting 改进后室内重建效果
【三维重建汇总】NeRF和GS重建中,如何排除干扰物?(RobustNeRF、PixelGS等论文汇总)
我愿称之为2024年【计算机视觉与三维重建】入门天花板教程,北邮大佬用15个小时给它讲明白了,不愧是名校公开课!!!
研一如何快速入门三维重建?华东理工博士带你通俗易懂的讲解三维重建的原理与算法,3小时就能学会!赶紧收藏
【三维重建】pixelGS:像素控制密度的3DGS高斯喷溅
【几何直觉】3D Gaussian Splatting(三维高斯泼溅), SuGaR 背后的几何 insight 讲解
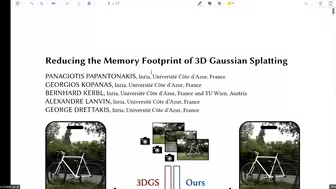
【三维重建】Reducing the Memory Footprint of 3D Gaussian Splatting(3D GS的加速与优化)
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
【三维场景展示】1原始森林(UE+NeRF/GS技术)
【图像分割】从SAM到fast-SAM、Mobile SAM分割大模型(对比与代码讲解)
申抒含:复杂场景三维重建与理解 | 2024人工智能暑期学校
【三维重建】DRAGON: Drone and Ground GaussianSplatting for 3D Building Reconstruction
强推!不愧是公认的讲的最好的【AI大模型全套教程】李宏毅大佬12小时带你从入门到进阶,一套全解决!
【今年各大顶会的焦点!】扩散模型这绝对是发论文超火的一个方向!各大顶会上榜方向!
【三维重建】china3dv大会-大规模动态场景的重建与渲染
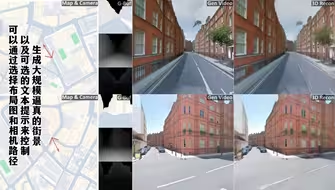
SIGGRAPH 2024 | Streetscapes:谷歌&斯坦福高调喊话:为智驾公司节省高开支,轻松实现“大规模街景生成
(超爽中英!) 2024公认最全的【吴恩达大模型LLM】系列教程!附代码_LangChain_微调ChatGPT提示词_RAG模型应用_agent_生成式AI
【手搓代码】从零手搓扩散模型Flow Matching(Rectified Flow),算法、模型、训练、推理全覆盖,github同步开源
【3DGS】自定义相机教程(含代码)(三维高斯泼溅)
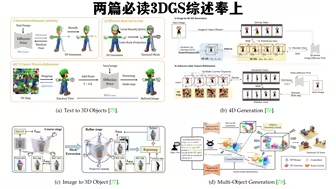
两篇与3DGS有关的综述奉上,<3DGS:调查、技术、挑战和机遇>主:<高斯分层:3D 重建与新新型视图合成>
强推!这可能是B站最全的(Python+机器学习+深度学习)系列课程了,堪称人工智能系列课程的巅峰之作!-人工智能/深度学习/机器学习
国内智驾老兵百度开源BEVWorld:通过统一BEV潜在空间实现自动驾驶的多模态世界模型
RealityCapture1.4-摄影测量融合三维激光扫描
《learning for 3D vision》之 lecture10-11: volume rendering 与NeRF(3D入门课程解读)
【三维场景展示】2大佛峡谷(UE+NeRF/GS技术)
3D Gaussian Splatting代码解读第二期part2(backward.cu)