V
主页
机器人学期末速成考试不挂科|考研复试速成/期末交个朋友
发布人
完整版见评论区或者见UP简介,机器人学期末复习速成,考试不挂科,考研复试速成,朋友们,备考加油冲鸭!!
打开封面
下载高清视频
观看高清视频
视频下载器
《机器人学》1小时不挂科速成课【小考神】
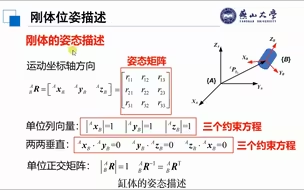
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
机器人技术基础(1)
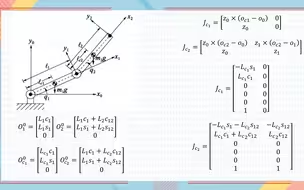
机器人DH法、运动学、雅克比(Jacobian)矩阵
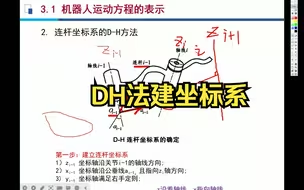
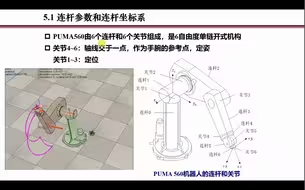
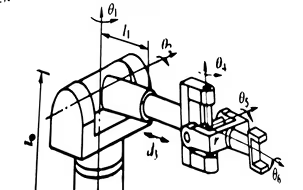
3-3DH法建坐标系
211机器人工程专业本科毕业待遇预估,希望可以帮助到大家
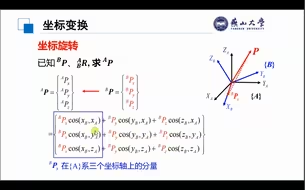
机器人学 l 2.2 坐标变换
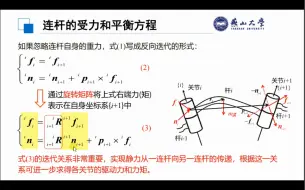
机器人学 l 3.7 连杆的受力与平衡方程
尤老师讲机器人机构学
21级 机器人技术基础 一二章复习
斯坦福大学公开课——机器人学
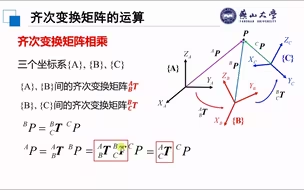
机器人学 | 2.4 齐次变换矩阵的运算(矩阵相乘与矩阵求逆)
斯坦福公开课【机器人学导论】全网最好!最详细!最干!的机器人学导论!学完及入门,原著作者亲自录制!膜拜!——(人工智能、深度学习、神经网络、机器学习)
机器人学 l 3.5 速度雅可比矩阵的位置求导法
机器人学导论 林沛群 (长视频版)
【Matlab机器人工具箱】- 运动学①---建立机器人模型--1、Link类 2、SerialLink类
机器人学导论 MOOC
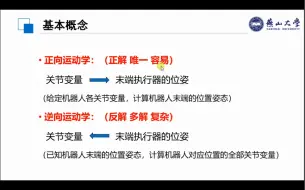
机器人学导论-第四章操作臂逆运动学
机器人学 l 3.2 连杆变换和运动学方程(正向运动学)
【机器人学】1小时期末考前冲刺课,我看谁不看【不挂科系列】
机器人学之位姿运动学(2)
ABB工业机器人期末考试祝大家期末不挂科
学机器人前认为的机器人专业VS学之后
机器人学导论例2.2讲解
RobotStudio一个简单的轨迹编程
二连杆机械臂动力学(使用雅克比Jacobian矩阵)
机器人机构学 期末复习
4-10机器人的静力分析
机器人学导论例3.3及例3.6
机器人 运动学 D-H经典方法和改进D-H方法参数表建立
【张雪峰】造机器人是什么专业?
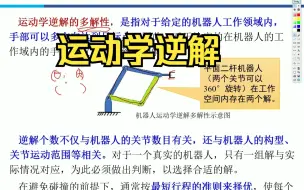
3-11运动学逆解
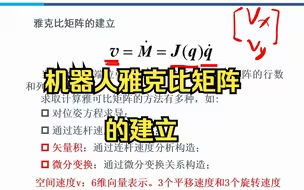
4-5机器人雅克比矩阵的建立
机器人运动学-逆运动学
机器人学 l 3.3机器人逆向运动学(以puma560为例)
机器人技术基础(3)
机器人概论
机器人学 l 7.1 机器人轨迹规划的相关概念
机器人技术基础(2)
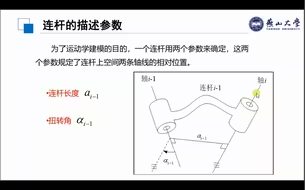
机器人学 l 3.1 连杆参数和关节变量