V
主页
港大等联合开源F2-Nerf!任意轨迹输入,训练只需几分钟!
发布人
本文提出了一种新颖的基于网格的NeRF,称为F2NeRF ( Fast-Free-NeRF),用于新颖的视图合成,它可以实现任意输入的相机轨迹,并且只需要花费几分钟的训练时间。现有的基于网格的快速NeRF训练框架,如Instant - NGP、Plenoxels、DVGO或TensoRF等,主要是针对有界场景设计的,依靠空间扭曲来处理无界场景。现有的两种广泛使用的空间变形方法仅针对前向轨迹或以360 °为中心的轨迹进行设计,无法处理任意轨迹。在本文中,我们深入探究了空间扭曲处理无界场景的机制。基于我们的分析,我们进一步提出了一种新的空间变形方法,称为透视变形,它允许我们在基于网格的NeRF框架中处理任意轨迹。大量实验表明,F2-NeRF能够在两个标准数据集和我们收集的一个新的自由轨迹数据集上使用相同的透视变换绘制高质量的图像。
打开封面
下载高清视频
观看高清视频
视频下载器
清华等联合开源!动态 3D 高斯超高保真头部重建
最新开源|支持惯性、激光雷达、双目和RGB-D传感器的系统!
【最新开源】SIGGRAPH 2022|在线试衣?输入文本即可任意更换衣服搭配,太有用了!南洋理工&商汤等新工作
ETHZ和微软重磅开源:首个联合检测与描述线特征的深度网络!无需标注,可推广任意数据集!
强!秒变高清,视频纹理去除!港大等新开源,CVPR2022
开源发射器猎弓的简短介绍
7.4m/s相对速度自主规避,高效抵抗外部干扰!港大最新发布
牛津大学发布!可扩展激光雷达NeRF SLAM,时间节省一半!
浙大&西交大等开源|使用贝叶斯核推理和优化的机器人自主探索!
波士顿动力机器人,要成精了!
电影:变形金刚汽车人;现实:不用变形也能站起来的小车机器人!
【原创】上海为什么能够后来居上,成为人工智能人才的引力场?
仅需73ms即可重建一帧,无需3D卷积的3D重建!UCL等最新开源,ECCV2022!
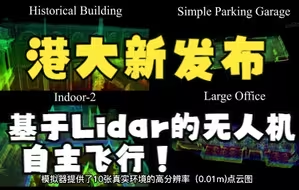
复杂环境下,基于Lidar的无人机自主飞行!港大最新发布!
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
【开源】ETH&微软提出:三维场景中的4D人体捕捉,抖动大幅减少!ICCV2021
手把手带你入门SLAM
【最新开源】ECCV2022|小姐姐活灵活现,将单视图语义转换为NeRF!莫纳什大学&南洋理工最新发布
对发电厂的自主探索丨以多传感器激光雷达为中心的高精度里程计和三维地图实时绘制方案
毫无痕迹?直接从3D场景中删除对象,NeRF中的3D修复!三星等新发布,CVPR2023!
开源六轴机械臂组装教程
1.4 ORB-SLAM2算法框架详解
强!手机平板上都可实时高效渲染的神经辐射场,谷歌新开源MobileNeRF!
IROS2022|腿式机器人+无人机强强联合,共同探索未知世界!苏黎世联邦理工研发
ICRA22 CMU机器人所讲座 | 机器人自主导航开发环境
PyQt-SiliconUI / 完善侧边消息,微调输入框,具标题输入框,灵动动画【开源】
【开源】普林斯顿大学发布|端到端深度神经视觉DROID-SLAM,大大超越传统方法!支持单目、双目和RGB-D!
裸眼3D而已,不要盲目自嗨,我们还落后很多。
CMU & ICRA22 UAV俯瞰视觉定位竞赛亚军技术方案分享|中国科学技术大学
免费云电脑(纯公益真免费awa)
MIT最新开源|野外环境下,机器人的风险感知运动规划!
PICO 4 Ultra值得升级吗?
最新款梦幻组合—半人马机器人
【开源项目】Mini-Omni 一个开源的多模态大型语言模型,可以边听边说边思考。具有实时端到端语音输入和流式音频输出会话功能。
仅需3张图像即可合成逼真新视图,学习NeRF并优化相机姿态!ETHZ&Google等开源,CVPR2023
港大新发布|多会话模式,长期关联LiDAR-IMU里程计和建图!
视频换图?全程高能,可应用于AR和视频编辑!港中大等即将开源,SIGGRAPH2022!
从头开始教你用VSCode开发Python程序!
科技感十足
听起来高深莫测的SLAM技术到底是啥?SLAM技术简介及入门方法