V
主页
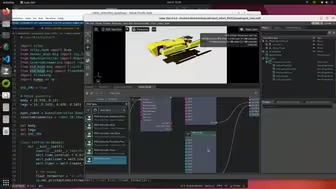
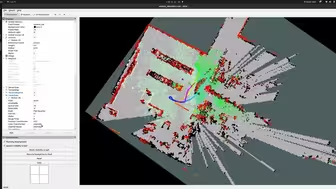
Airsim ROS仿真 Octomap建图
发布人
AirSim环境下进行ROS仿真,通过点云数据和里程计数据,基于OctoMap建立八叉树地图。解决了pointcloud2的fram_id不对应的问题
打开封面
下载高清视频
观看高清视频
视频下载器
【Airsim仿真】ORB-SLAM3实时构建稠密点云地图-demo
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
使用Isaac Sim和ROS2实现大田农业机器人
22年十佳开源SLAM算法
使用Isaac Sim和ROS2控制机器狗指南
无人机SLAM入门教程(一):课程概述1.3 传感器简介
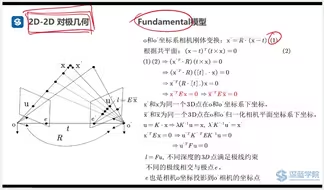
SLAM系统-上 北邮教授深入浅出三维视觉技术(全网质量最高)
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
无人机SLAM入门教程(一):课程概述1.1 SLAM基础概念
闲置一年的自制ros小车,终于第一次成功利用开源gmapping建图
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
【开源无人车】从零组装一辆开源PIX无人车
MoveIt与Isaac Sim结合使用
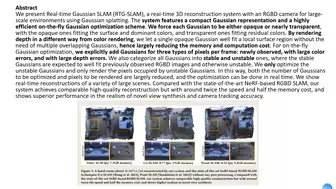
11月15日组会:RTG-SLAM: Real-time 3D Reconstruction at Scale Using Gaussian Splatting
无人机SLAM入门教程(一):课程概述1.6 后端优化
A-LOAM和LeGo-LOAM的SLAM对比,使用Kitti数据集odometry的05序列
fastlio建图与自主导航演示
无人机SLAM入门教程(一):课程概述1.5 内容整理复习
多旋翼无人机使用多相机SLAM同时定位
ROS控制 | 小车底盘控制讲解
如何从手持SLAM数据到MESH网格
矿洞扫描有难度?看赛尔S10如何轻松应对!
Go2开发教学10-SLAM 导航服务接口
要啥激光雷达,2D、2.5D、3D地图我全都有,Factor Perception SDK纯视觉SLAM地图数据展示
12步搭建智能机器人: 从设计到AI入门
7.2无人机PID参数调试
NVIDIA Isaac ROS 3.0:重塑机器人未来
ROS与STM32通信编程(下)
视觉SLAM VIO开源代码解析
【开源无人机】从零组装一架开源无人机M0-F250
【Robomaster】3SE战队自动步兵仿真环境搭建
电饭锅们出来军训了ʕ ᵔᴥᵔ ʔ
端到端机械臂视觉抓取无人配送的场景演示
3D建图小能手
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
三维空间扫描仪 高效率重建古建筑
技术已死、技术无用、技术不值钱、技术无出路,佐大带你走上开悟之路
浙大章国锋团队最新NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限(上篇)
SLAM扫描设备产品答疑
【RoboMaster】2021对抗赛场地内路径规划仿真