V
主页
京东 11.11 红包
Model-free vs Model-based Reinforcement Learning -- Oriol Vinyals
发布人
https://www.youtube.com/watch?v=_rKzhhDRq_4
打开封面
下载高清视频
观看高清视频
视频下载器
Policy Gradient Theorem Explained - Reinforcement Learning
A Reinforcement Learning-based Framework for 机器人技能
Deep Reinforcement Learning and Ultra-Wideband for autonomous navigation in serv
斯坦福大学《强化学习|Stanford CS234 Reinforcement Learning 2024》deepseek翻译
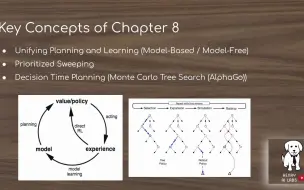
Planning and Learning - Reinforcement Learning Chapter 8
Reinforcement Learning for Real-World Robots
Autonomous Driving Robot with Reinforcement Learning
TD3 Reinforcement Learning On Bipedal Robot
Distributed and Multiagent Reinforcement Learning
Dynamic Actor-Advisor Programming for Scalable Safe Reinforcement Learning
Bellman Principle of Optimality - Reinforcement Learning
#3 Monte Carlo Methods - Reinforcement Learning Turkiye
Real World Human Robot Collaborative Reinforcement Learning
小结 - Fundamentals of Reinforcement Learning
Motorcycle Self Balancing Using Reinforcement Learning
Sim2Real Transfer_ Time-in-State Deep Reinforcement Learning
LBGP_ Learning Based Goal Planning for Autonomous Following
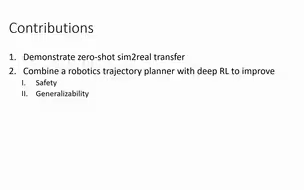
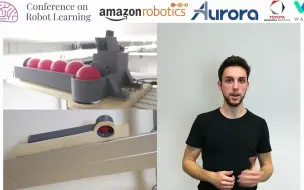
CoRL 2020, Spotlight Talk 135_ High Acceleration Reinforcement Learning
OpenAI Baselines - Reinforcement Learning Agents!
Using Optimal Value Functions to Get Optimal Policies
这可能是我见过强化学习和模型预测控制最好的教程!四大名校教授精讲动态系统和仿真、最优控制、策略梯度方法、MPC
一个很变态......但可以光速学会人工智能基础的神奇方法!B站强推,少走99%的弯路,资深大佬花费256小时整理的2024最全面人工智能教程!
Overcoming sparse rewards in Deep RL
复现human2humanoid
具身智能新思路———Diffusion Policy 结合 PPO 模仿+强化 (上)
强推!这绝对是B站最全的(python+机器学习+深度学习)系列教程,草履虫都能学会,学不会你来锤爆我!人工智能/机器学习/深度学习/python/神经网络
Diffusion-based Path Planner for Synthesizing Trajectories Applied on Quadruped
Decaying Action Priors for Accelerated Imitation Learning of Torque-Based Legged
CoRL 2020, Spotlight Talk 203_ Contrastive Variational Reinforcement Learning
ROS+OpenAI(10)基础6-ROS时间
ROS+OpenAI(11)基础7-tf2坐标变换与四元数
付费全集不会还有人没看吧!这可能是B站最全的(Python+机器学习+深度学习)系列课程了,零基础入门学不会你来打我就完事了!-人工智能/深度学习/机器学习
入门到成神!三小时可快速上手的【深度强化学习】,不愧是北大王树森博士,讲的是真的通俗易懂!
Learning sequences of manipulation primitives for robotic assembly
ROS+OpenAI(13)urdf进阶-xacro
Real-time Active Vision for a Humanoid Soccer Robot Using DRL
Diffusion Policy 结合 PPO 模仿+强化 (下)
机械臂 强化学习 平衡一个球
IsaacLab交流群及文档更新说明
matlab动力学建模与simscape验证