V
主页
京东 11.11 红包
ROS+OpenAI(13)urdf进阶-xacro
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
ROS+OpenAI(15)ROS-control
ros+openai(6)基础2
ros+openai(5)基础1
ROS+OpenAI(14)gazebo物理参数
ROS+OpenAI(7)基础3-“服务”
ros+openai(3-2)tensorflow1
乐高-球形机器人
ROS+OpenAI(9)基础5-树莓派与虚拟机的ROS通信
ros+openai(3)本地安装
OpenAI Baselines - Reinforcement Learning Agents!
ROS+OpenAI(4-1)从零开始创建智能小车-建模
Reinforcement Learning for Real-World Robots
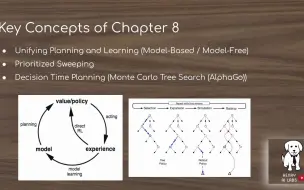
Planning and Learning - Reinforcement Learning Chapter 8
ros+openai(2)虚拟机演示
ROS+OpenAI(12)基础8-数据记录与导出
ROS+OPENAI(16)shell的简单使用
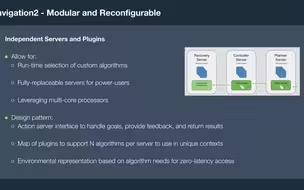
The Marathon 2_ A Navigation System (IROS 2020)
Overcoming sparse rewards in Deep RL
谈一谈AI/ML的未来
ros+openai(1)简介
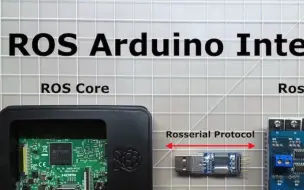
Integration of ROS and Arduino - #1
Policy Gradient Theorem Explained - Reinforcement Learning
Upside-Down 强化学习
用ROS搭建一台自平衡机器人
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
无监督 强化学习 导航 元 技能
Distributed and Multiagent Reinforcement Learning
树莓派 3b ubuntumate 安装 ros
Autonomous Driving Robot with Reinforcement Learning
机械专业的同学 值得一看 很不错的动画
Reinforcement Learning Machine Learning Meets Control Theory
ROS - Arduino serial basics
Lecture 03_ Dynamic Programming
纯机械实现的 谐波分析仪
Dynamixel Tutorial _ How to control the Dynamixel Ax12 Motor using
Exercise 03_ Dynamic Programming
ROS Robotics Tutorials _ Robot Operating System
VR 手
31 Flexible Material and Mechanism Design
ROS+OPENAI(17)pdb调试工具