V
主页
京东 11.11 红包
40-Vrep Coppeliasim初识GUI
发布人
我的QQ:3336989737 欢迎讨论交流
打开封面
下载高清视频
观看高清视频
视频下载器
32-Vrep Coppeliasim线程与非线程子脚本的区别
11-1vrep.coppeliasim场景对象-初识关节
技术实例-外部机器人模型导入Coppeliasim(由模型生成关节)
2-初识机器人工具箱
vrep.coppeliasim四旋翼无人机脚本解读
实例 vrep.coppeliasim4轮差动小车控制
11-2vrep.coppeliasim场景对象-关节模式及编程
18-vrep.coppeliasim场景对象-八叉树Octree
15-vrep.coppeliasim场景对象-力传感器
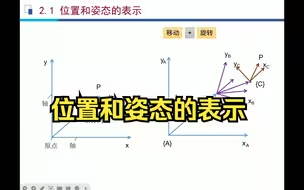
2-1位置和姿态的表示
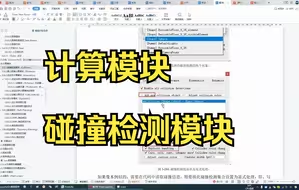
20-vrep.CoppeliaSim计算模块-碰撞检测模块
vrep.Coppeliasim机器人工作区域显示
10-1 vrep.coppeliasim场景对象-容易让人晕的基本形状
22-vrep.Coppeliasim计算模块-运动学模块(3)
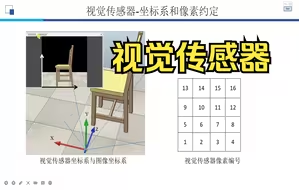
14-vrep.coppeliasim场景对象-视觉传感器
4-20使用Coppeliasim实现Bug2算法的例子
12-vrep.coppeliasim场景对象-标记点dummy(吐槽一下4.3)
16-vrep.coppeliasim场景对象-路径Path
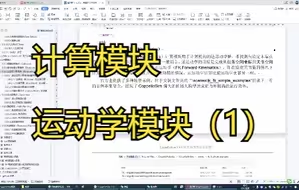
22-vrep.Coppeliasim计算模块-运动学模块(1)
01软件介绍-1CoppeliaSim Vrep安装及官网介绍
17-vrep.coppeliasim场景对象-Graph
vrep.Coppeliasim的Dummy模拟吸盘实现机器人抓取物体
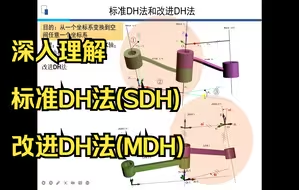
深入理解标准DH法(SDH)和改进DH法(MDH)
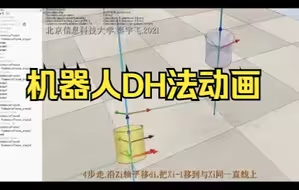
机器人dh法动画
40 Webots两轮差分机器人
02-2vrep.coppeliasim视图操作
Object is model base的补充说明
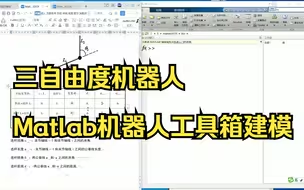
3-14三自由度机器人Matlab机器人工具箱建模
19B-vrep.coppeliasim.Lua语言基础-简介HelloWorld及4.2闪退问题
粉丝答疑:vrep.coppeliasim关节力矩的设置
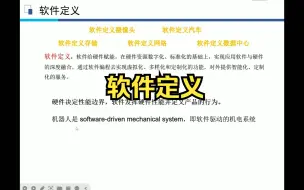
2-00软件定义
场景对象的综合实例1
19D-vrep.coppeliasim.Lua语言基础-基本数据类型table
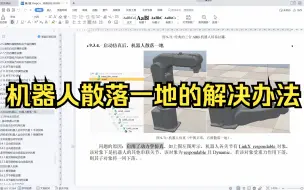
vrep/coppeliasim串联机器人散落一地的解决办法
19F-vrep.coppeliasim.Lua语言基础-变量作用域
responsible属性掩码详解及由此导致的抖动和关节错位
工业机器人组成
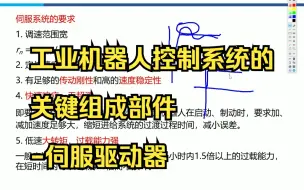
7-7工业机器人控制系统的关键组成部件-伺服驱动器
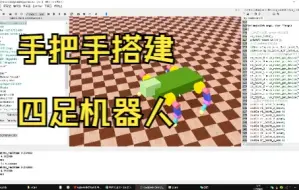
实例 手把手搭建Webots四足机器人(机器狗)
3-9自主移动机器人-运动合成作用建模-三轮全向底盘(机器人)的仿真实例vrep.coppeliasim