V
主页
京东 11.11 红包
19F-vrep.coppeliasim.Lua语言基础-变量作用域
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
20-vrep.CoppeliaSim计算模块-碰撞检测模块
01软件介绍-1CoppeliaSim Vrep安装及官网介绍
技巧-1 vrep.coppeliasim脚本编辑器参数调整及更改为其他编辑器
15-vrep.coppeliasim场景对象-力传感器
实例:vrep.coppeliasim连接真实机器人
11-1vrep.coppeliasim场景对象-初识关节
19D-vrep.coppeliasim.Lua语言基础-数据类型转换
22-vrep.Coppeliasim计算模块-运动学模块(3)
coppeliasim4.1 QQ群总结2023.6.3
Coppeliasim中的PID算法
19D-vrep.coppeliasim.Lua语言基础-基本数据类型table
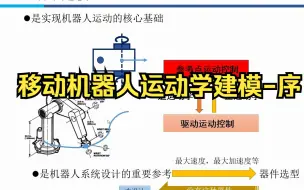
3-1移动机器人运动学建模-序
3-5DH4个参数TheataD
22-vrep.Coppeliasim计算模块-运动学模块(2)
3-7自主移动机器人-运动合成作用建模-四轮差动底盘(机器人)的仿真实例vrep.coppeliasim
22-vrep.Coppeliasim计算模块-运动学模块(1)
7-3工业机器人控制系统方案-基于PLC
01-Webots简介(与Vrep.Coppeliasim对比)
32-Vrep Coppeliasim线程与非线程子脚本的区别
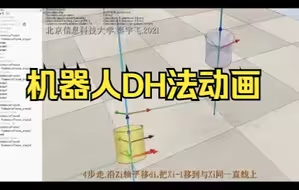
机器人dh法动画
3-19六自由度机器人Matlab机器人工具箱建模
21-vrep.Coppeliasim计算模块-最小距离检测模块
2-00软件定义
02-2vrep.coppeliasim视图操作
7-4工业机器人控制系统方案-基于运动控制卡
技巧-1补充-Vrep Coppeliasim使用VS Code作为脚本编辑器的设置方法
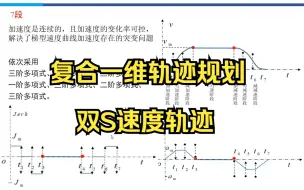
4-30复合一维轨迹规划-双S速度轨迹
vrep.coppeliasim四旋翼无人机脚本解读
使用coppeliasim学习dh算法
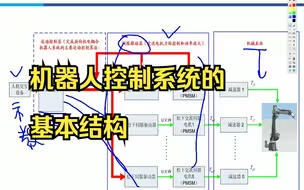
7-2机器人控制系统的基本结构
52-Vrep.Coppeliasim Matlab.Vc.Python等API接口二次开发必看
10-2vrep.coppeliasim场景对象-形状的动力学材料属性
vrep.Coppeliasim机器人工作区域显示
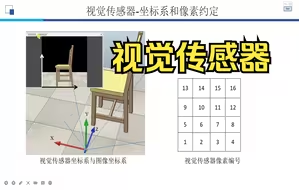
14-vrep.coppeliasim场景对象-视觉传感器
工业机器人组成
18-vrep.coppeliasim场景对象-八叉树Octree
12-vrep.coppeliasim场景对象-标记点dummy(吐槽一下4.3)
实例:vrep.coppeliasim四足机器人机器狗仿真实例
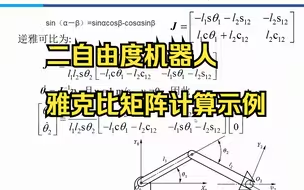
4-3二自由度机器人雅克比矩阵计算示例
技巧-1补充2-Coppeliasim4.1使用新版VS Code(1.74)和ChatGpt