V
主页
京东 11.11 红包
3-9自主移动机器人-运动合成作用建模-三轮全向底盘(机器人)的仿真实例vrep.coppeliasim
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
3-11自主移动机器人-运动合成作用建模-麦克纳姆轮全向底盘(机器人)的仿真实例vrep.coppeliasim
技术实例-外部机器人模型导入Coppeliasim(由模型生成关节)
3-10自主移动机器人-运动合成作用建模-麦克纳姆轮全向底盘(机器人)
实例:vrep.coppeliasim连接真实机器人
3-3DH法建坐标系
3-13自主移动机器人-运动合成作用建模-阿克曼底盘(机器人)的仿真实例Webots
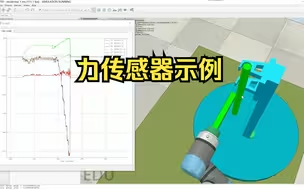
力传感器示例
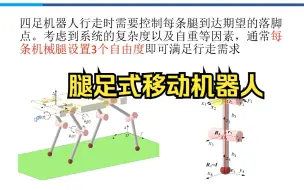
3-33腿足式移动机器人
15-vrep.coppeliasim场景对象-力传感器
3-2自主移动机器人-轮子的类型
32-Vrep Coppeliasim线程与非线程子脚本的区别
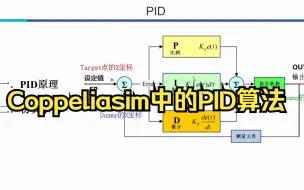
Coppeliasim中的PID算法
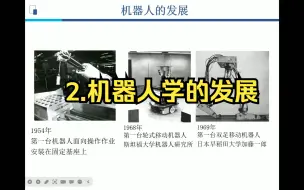
2.机器人学的发展
vrep.Coppeliasim机器人工作区域显示
02-2-vrep.coppeliasim认识模型
4-20使用Coppeliasim实现Bug2算法的例子
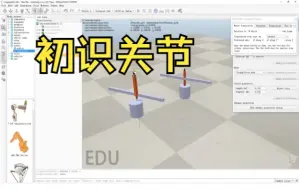
11-1vrep.coppeliasim场景对象-初识关节
3-8自主移动机器人-运动合成作用建模-三轮全向底盘(机器人)
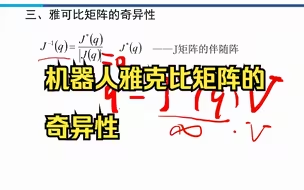
4-4机器人雅克比矩阵的奇异性
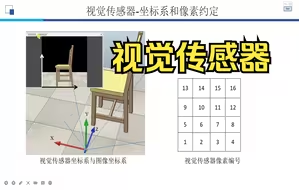
14-vrep.coppeliasim场景对象-视觉传感器
04-vrep.coppeliasim对象common属性及相应脚本操作
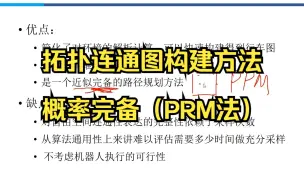
4-9拓扑连通图构建方法--概率完备(PRM法)
移动和旋转的补充说明及高频使用的对齐操作
11-2vrep.coppeliasim场景对象-关节模式及编程
10-1 vrep.coppeliasim场景对象-容易让人晕的基本形状
vrep/coppeliasim串联机器人散落一地的解决办法
技巧-1补充2-Coppeliasim4.1使用新版VS Code(1.74)和ChatGpt
16-vrep.coppeliasim场景对象-路径Path
1-9自主移动机器人一般结构
3-0机器人模型及连杆
responsible属性掩码详解及由此导致的抖动和关节错位
6-6关节空间的高阶多项式插值
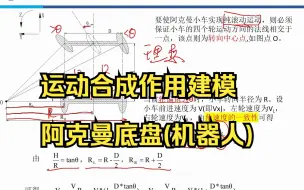
3-12自主移动机器人-运动合成作用建模-阿克曼底盘(机器人)
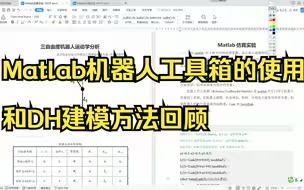
3-13Matlab机器人工具箱的使用和DH建模方法回顾
实例:Coppeliasim和Arduino混合仿真(数字孪生)
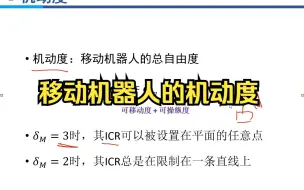
3-28移动机器人的机动度
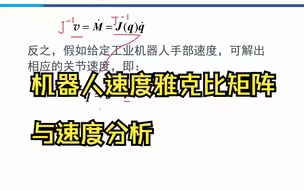
4-2机器人速度雅克比矩阵与速度分析
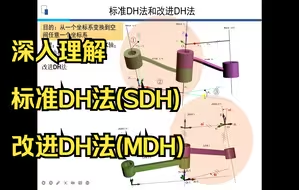
深入理解标准DH法(SDH)和改进DH法(MDH)
Object is model base的补充说明
7-6工业机器人控制系统的关键组成部件-电机