V
主页
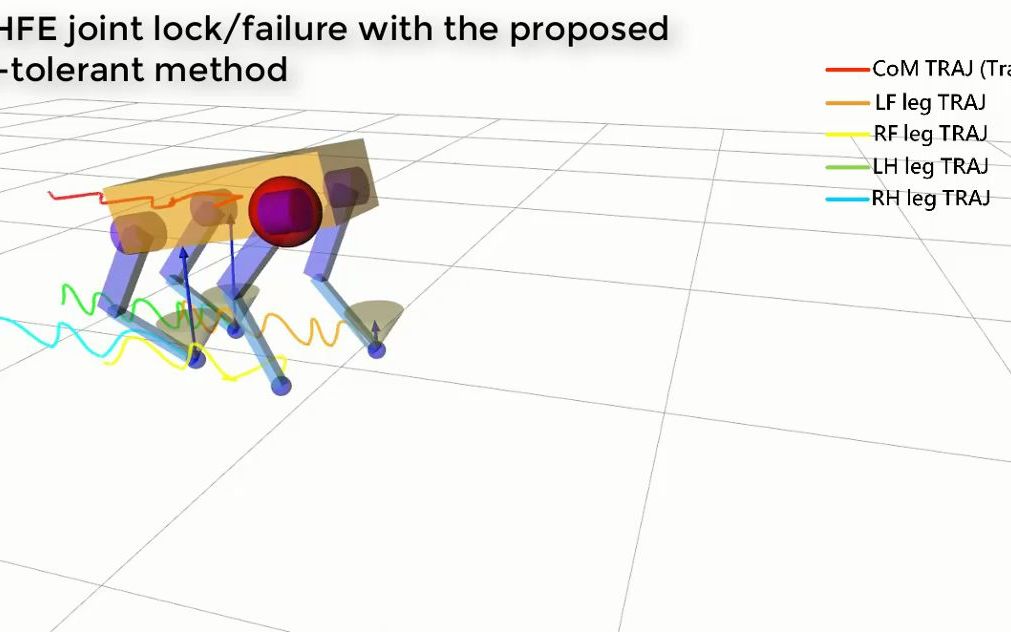
一种四足机器人容错想法
发布人
Fault-tolerant motion planning and generation of quadruped robots synthesised by posture optimization and whole body control 开源了一部分连续静态行走的工程: https://github.com/JameScottX/Quasi-static-control-of-quadruped-robot
打开封面
下载高清视频
观看高清视频
视频下载器
强化学习训练四足机器人前进
四足连续静态行走
对足支撑缓慢踏步的四足机器人
四足连续静态行走测试
四足机器人Trot步态
四足机器人分层学习模型
[CL]ESP32四足机器人操作演示-适配立创开源平台对应项目
第二届中国高校创意机器人大赛-双手臂解魔方2
【毕业设计开源】机器人全栈开发,四足机器人系统设计【优秀毕设】
四足机器人ROS PID控制原理讲解
星动机器人-2023世界机器人大会测试
The humanoid walks mildly with varying velocity.
成本低廉 | 软硬件开源机器猫 CaT | 四足机器人 | 人工智能机器人 | 开源机器人 | 机器狗
二足机器人自适应上下台阶
分享之前录的一个视频:用手柄控制四足机器人
Svan M2: 用于机器人和人工智能研究的四足研究平台
二足机器人 VTK 显示脚末端力(Based on TCP)
2024 IROS QRC(四足机器人挑战赛)浙大机器人队自主导航运动
NAO机器人移动避障(webots)
第二届中国高校创意机器人大赛-双手臂解魔方
二足机器人间歇性跳跃
【开源】舵机机器人控制板-舵狗控制板-高度集成-ESP32S3主控-18路PWM信号输出
这只机器狗成精了 | 像人一样爬梯子 | 欧洲最强机器狗 ANYmal | 具身智能 | 神经网络 | 人工智能 | 四足机器人
二足机器人平坦地面静态行走
The humanoid robot with jogging locomotion control
二足机器人间歇性跳跃(平坦地面)
One shot from start to the end of a real humanoid robot walking with goods.
CORL 2024,可微分仿真学习四足机器人运动
机械手解魔方测试
强化学习训练四足-Unity3D
吊打机器狗,全地形越野四足机器狼—山猫
我国四足机器狗已形成战斗力!!! 服役一代、研制一代、预研一代、探索一代
蛇型机器人(webots)
首届中国高校智能机器人创意大赛作品
机器狗采矿竞赛
呼叫全体机器人!
多机器人编队(3X7)Collective motion dynamics of active solids and active crystals
【波士顿动力】中文字幕|米其林工厂的Spot
宇树科技 | 最能挨打的机器狗 GO2 | 人工智能机器人 G1
能越障跑酷的机器人,中国杭州造!