V
主页
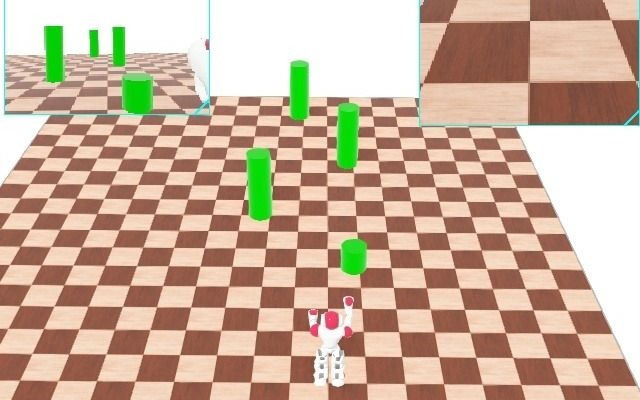
NAO机器人移动避障(webots)
发布人
最近很无聊,上传下之前本科做的小项目。
打开封面
下载高清视频
观看高清视频
视频下载器
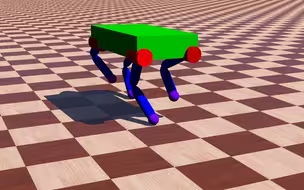
四足机器人Trot步态
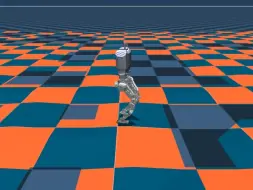
The humanoid walks mildly with varying velocity.
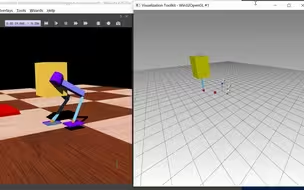
二足机器人 VTK 显示脚末端力(Based on TCP)
二足机器人平坦地面静态行走
机械臂任务空间全动力学控制(鸡头稳定)
二足机器人自适应上下台阶
强化学习训练四足机器人前进
今天,我测试了Mini 4 Pro的返航,发现一个出乎意料的结果
第二届中国高校创意机器人大赛-双手臂解魔方2
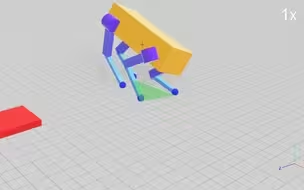
二足机器人间歇性跳跃
对足支撑缓慢踏步的四足机器人
蛇型机器人(webots)
The humanoid robot with jogging locomotion control
小车视觉巡线迷宫(webots)
二足机器人间歇性跳跃(平坦地面)
强化学习(PPO)小车避障
【翻拍】:DJI Mini 4 Pro丨交给全向避障
One shot from start to the end of a real humanoid robot walking with goods.
强化学习(PPO)训练小车避障到达目标
Massive parallel training based on mjx
多机器人编队(3X7)Collective motion dynamics of active solids and active crystals
【UE5】如何快速制作移动避障系统
[CoRL]四旋翼无人机基于单目事件相机的障碍物避让 | 2024 宾夕法尼亚大学 & 苏黎世大学
Air 3S夜间幽灵避障@DJI大疆创新
Collective motion dynamics of active solids and active crystals (AES实践)
星动机器人-2023世界机器人大会测试
我超爱大疆智能导航的
Learning-based control of a biped robot via MJX and JAX.
四足机器人分层学习模型
首届中国高校智能机器人创意大赛作品
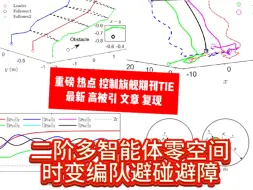
零空间非线性多智能体固定时间时变避碰编队滑模控制
Air 3S树林返航
第二届中国高校创意机器人大赛-双手臂解魔方
四足连续静态行走
6个智能体的编队导航与避障_补充实验
四足连续静态行走测试
浮动基座机械臂鸡头稳定
浮动基座力位混合控制
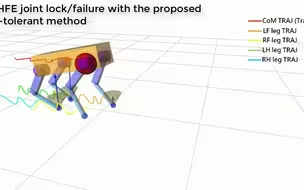
一种四足机器人容错想法
强化学习(PPO)训练小车到达目标