V
主页
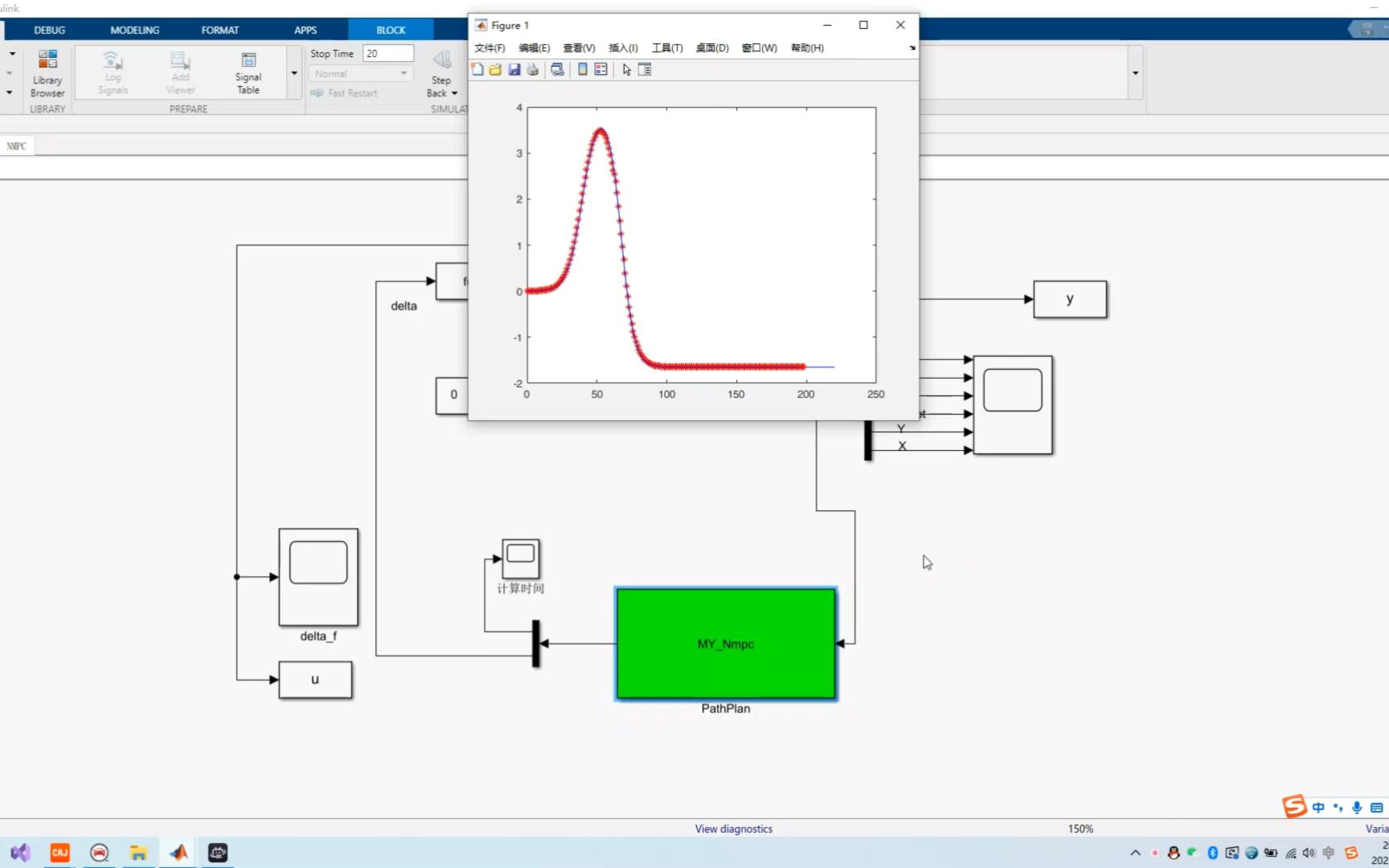
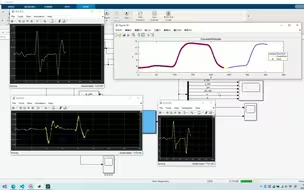
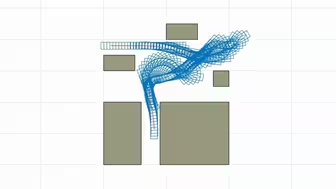
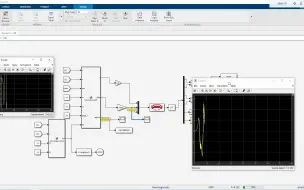
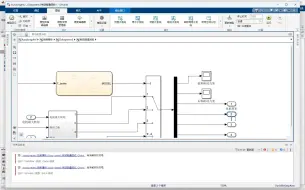
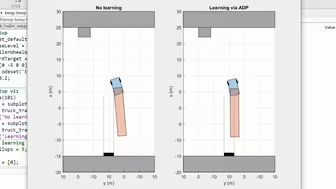
自动驾驶控制-非线性Nmpc跟踪双移线路径
发布人
对动力学模型不做线性化处理从而转为二次规划问题,直接使用非线性模型求解,缺点是求解比较费时间。
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶控制-纯跟踪路径跟踪仿真
自动驾驶控制-基于车辆运动学模型的MPC路径跟踪
纯跟踪算法跟踪双移线路径
simulink与carsim 自动驾驶路径跟踪
自动驾驶控制-三自由度动力学模型mpc跟踪自定义路径
自动驾驶控制-单点预瞄PID路径跟踪
基于Nmpc的自动驾驶路径规划与MPC的路径跟踪
Stanely算法跟踪双移线路径
自动驾驶控制-动力学跟踪误差模型LQR路径跟踪
自动驾驶控制-横向mpc纵向双pid轨迹跟踪
自动驾驶控制-基于mpc的速度跟踪控制
自动驾驶控制-纵向MPC横向LQR轨迹跟踪
半挂车混合A*路径规划大法
自动驾驶控制-运动学模型MPC跟踪圆形轨迹
汽车运动学与动力学系列-二自由度车辆动力学模型验证
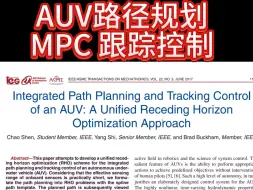
IEEE trans:水下机器人AUV的路径规划和基于模型预测控制MPC的跟踪框架
基于运动学模型LQR跟踪双移线路径
制动能量回收11
Stanely和Lqr算法的c++实现
汽车运动学与动力学系列-魔术轮胎模型验证
c++实现的apollo_fem_smoother,用于参考路径的平滑
半挂车泊车算法
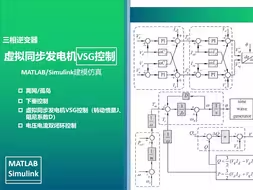
虚拟同步发电机VSG(一)三相逆变器孤岛离网MATLAB/Simulink仿真
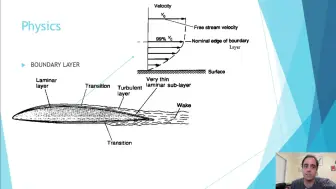
计算空气动力学编程—翼型与机翼
闺蜜都谈两任了 而你只会干饭
10.simulink官方教学-第10章 创建libraries
什么?她居然又来了一遍?!
2024华数杯A题机器臂关节角路径优化MATLAB完整求解
Stateflow教程 05 流程图常用样板(Pattern)的使用
205:一分钟搞定联合概率数据互联JPDA多目标跟踪
有限元基础编程 | 平面高阶单元
今天是紫葫芦-Take me to your heart
【SCI论文写作】导师散养不教?研究生如何靠自己2周写完一篇SCI论文,从基本套路讲解和手把手实操演示-太适合小白!
汽车运动学与动力学系列-带遗忘因子的递推最小二乘法轮胎线性侧偏刚度估计
物理差?看它!动态平衡白捡6分,四大方法助你成功解决动态平衡的所有难题!【高考物理晴姐】
和异性的性福时刻(18)
含泪总结😭孕期最后悔的7件事💔能救一个是一个❗
汽车运动学与动力学系列-车辆运动学模型验证
2024华数杯A题机械臂优化Matlab代码求解
LBM三维多孔介质渗流 波尔玻尔兹曼 D3q19 渗透率