V
主页
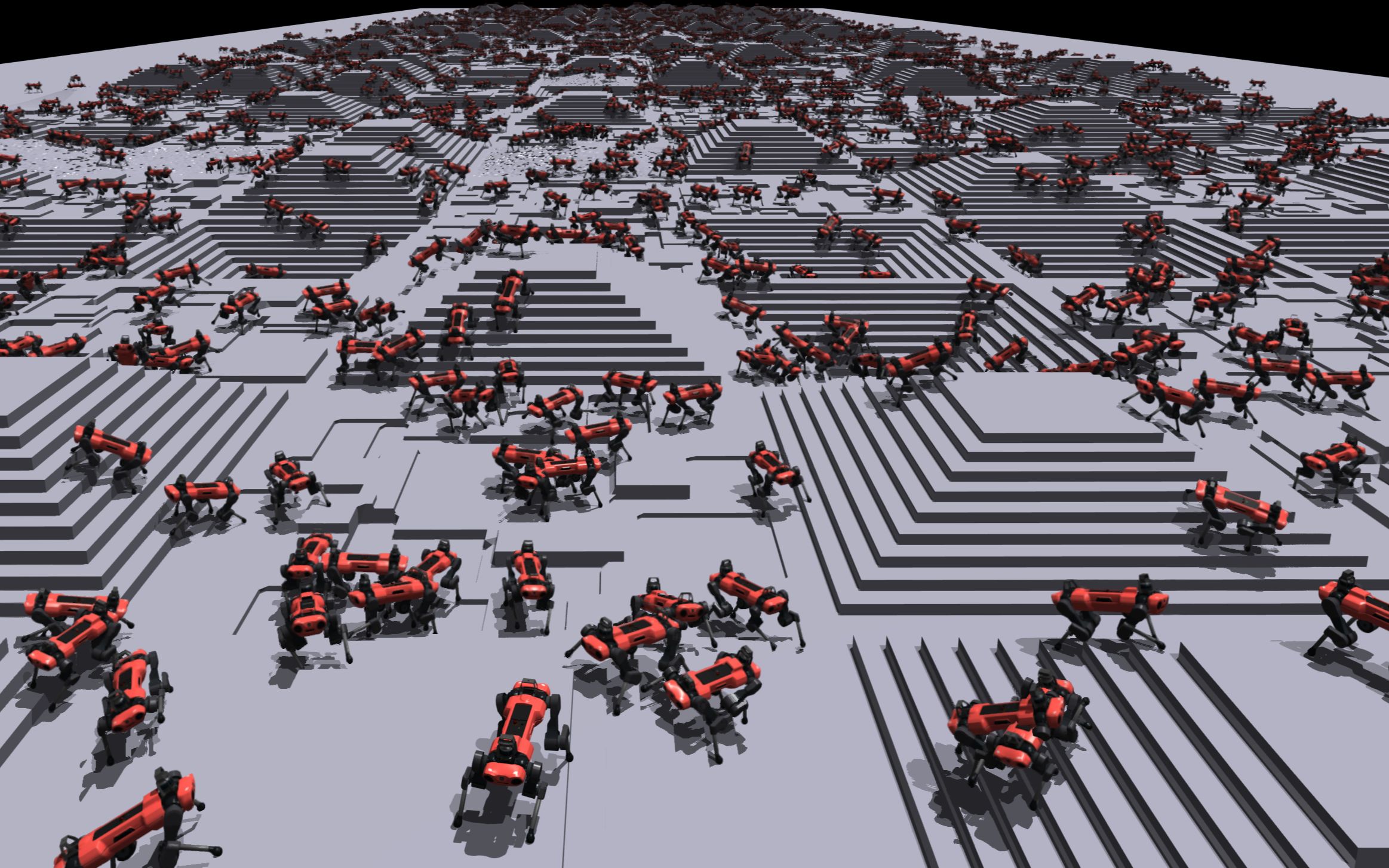
【Isaac Gym】四足&双足-强化学习训练效果
发布人
前段时间发现了ETH的一个足式机器人强化学习的开源项目,拿来自己训练了一下,效果还挺不错,3070ti laptop上几个小时就能训练好,前景可期。 开源代码地址:https://github.com/leggedrobotics/legged_gym 项目网站:https://leggedrobotics.github.io/legged_gym/ 论文:https://arxiv.org/abs/2109.11978
打开封面
下载高清视频
观看高清视频
视频下载器
NVIDIA公开课AI机器人开发第一讲NVIDIA_Isaac_Sim_入门
isaacgym-一周实现从四足到两足的奔跑
四足机器人鲁棒&高速移动的强化学习控制器
【开源仿真】强化学习isaac gym—宇树科技 G1人形机器人
高擎机电运动控制算法开源|强化学习篇
【四足机器人】并行强化学习调参 MPC
NVIDIA机器人之Isaac介绍
【强化学习】NVIDIA Isaac Gym
人形机器人强化学习训练方法,为什么腿是直着的?humanoid gym
你的下一个机器人仿真环境,何必是isaac sim
Isaaclab-Gazebo仿真
四足机器人强化学习sim to real(walk these ways)
强化学习框架-Legged Gym 训练代码详解
双足机器人强化学习humanoid-gym sim2sim详细学习过程,Openloong的urdf为例
【开源】强化学习sim to sim
经典内模估计+强化学习,四足机器人训练一小时,即可穿越任意地形
【Isaac Sim】通过urdf导入机器人并通过rmpflow控制机器人运动/避障
尝试强化学习_RTX2060负重前行
[新作预告]四足机器人强化学习盲爬楼梯
强化学习轮足机器人控制器
开源:使用mujoco进行pai双足机器人仿真
四足机器人强化学习多步态控制
【四足机器人】基于 MPC 控制的并行仿真
强化学习第一步---换个模型玩
[pytorch 强化学习] 01 认识环境(environment,gym.Env)以及 CartPole-v0/v1 环境
四足机器人ROS2 Humble + NVIDIA Isaac Sim仿真
Isaac sim Orbit UR10e机器人强化学习抓取仿真
【开源】宇树Go2强化学习部署Demo - walk-these-ways-go2
faive_gym: 在GPU上使用IsaacGym训练自己的机器手
isaac sim具身智能仿真系列:【1】管他37 21,装好了仿真就算是具身大佬了(佛系胡乱更新中)
基于Isaac Gym的四足机器狗强化学习控制翻越梅花桩
使用Isaac-sim训练双足机器人行走
【搬】NVIDIA Isaac Gym 仿真中的无刷版Pupper 群
【Isaac Sim】在Isaac Sim中运行强化学习的Demo
四足机器人强化学习鲁棒运动
unitree b1/a1四足机器人纯MPC控制gazebo仿真,验证学习过程中MPC、状态估计和姿态估计
Isaac Lab中文版文档正式上线!
适用于强化学习的并行qpmpc求解器
强化学习+狗,去朋友公司体验了一下狗,效果很不错啊【云深处科技】
四足机器人强化学习之路