V
主页
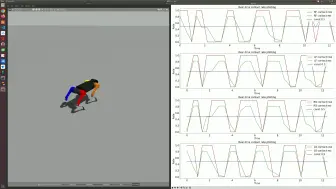
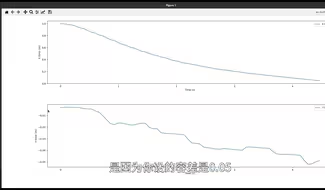
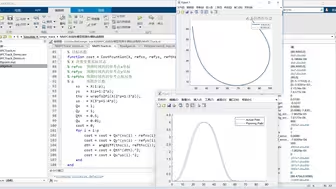
unitree b1/a1四足机器人纯MPC控制gazebo仿真,验证学习过程中MPC、状态估计和姿态估计
发布人
在位控框架基础上验证学习四足控制过程中的MPC相关部分,文献参考MIT cheetah、yxy佬毕业论文、杨太文佬和狗王的帖子等,代码参考MIT cheetah、yy硕佬等
打开封面
下载高清视频
观看高清视频
视频下载器
四足机器人纯位置控制gazebo仿真,验证学习过程中仿真控制、运动学、FSM和步态相关
unitree a1四足机器人触地估计gazebo仿真,复现Bledt无足底传感器的离散观测器方案
【开源】宇树Unitree Go2四足机器人/机器狗Isaac Sim/Isaac Lab ROS2仿真平台
四足机器人ROS PID控制原理讲解
四驱四转(4WD-4WS)底盘导航规划仿真,FAST_LIO建图定位、Hybrid A*全局规划、局部避障和NMPC轨迹跟踪
【超多模型MPC算法】开源Mujoco-MPC演示
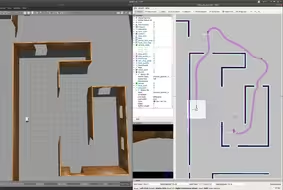
基于Gazebo的无人车激光SLAM建图与导航仿真
Gazebo下载及简单使用介绍
CORL 2024,可微分仿真学习四足机器人运动
《ROS 2机器人开发从入门到实践》7 自主导航 让机器人自己动起来
轨迹优化|矩形增量膨胀安全走廊构建算法(附ROS C++/Python实现)
研究生入学培训:线性非线性MPC的代码:线性增量式MPC,ESO-MPC,线性MPC(手写KKT条件求解,调用QP函数),非线性MPC(SQP工具箱及手写代码)
闲置一年的自制ros小车,终于第一次成功利用开源gmapping建图
【波士顿动力】中文字幕|米其林工厂的Spot
《ROS 2机器人开发从入门到实践》6.5.5使用两轮差速控制器控制机器人
基于MPC模型预测控制的四旋翼路径跟踪仿真设计(状态空间模型)
吊打机器狗,全地形越野四足机器狼—山猫
ROS控制 | 小车底盘控制讲解
室外ROS 省赛实录 [速度较慢可以展示]
端到端机械臂视觉抓取无人配送的场景演示
[复现]基于李雅普诺夫的模型预测控制MPC水下机器人AUV方法路径跟踪
这只机器狗 越野能力好猛 | 欧洲运动能力最强的机器狗 ANYmal
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
开源!基于RRT*的路径规划算法(ROS C++/Python/Matlab实现)
【开源无人车】从零组装一辆开源PIX无人车
Isaac Sim和ROS2自主移动机器人(bcr_bot)
基于MPC+NMPC模型预测控制的车辆运动学模型轨迹跟踪Matlab仿真【附说明文档】
机器人移动底盘
右边两足走路也是双足行走
宇树狗儿 新增功能〖跳跃跑〗
B2机器狗负重夜爬太子尖
12步搭建智能机器人: 从设计到AI入门
分享之前录的一个视频:用手柄控制四足机器人
《ROS 2机器人开发从入门到实践》7.4.2使用TF获取机器人实时位置
【留学日记#252】宇树UnitreeB1机器人左前腿拆卸(2024.7.28)
国产 | 像人一样站立行进的机器狗 W1 | 逐际动力 |
成本低廉 | 软硬件开源机器猫 CaT | 四足机器人 | 人工智能机器人 | 开源机器人 | 机器狗
NVIDIA Isaac ROS 3.0:重塑机器人未来
Decaying Action Priors for Accelerated Imitation Learning of Torque-Based Legged